Array
Static and Dynamic Arrays
static array
- fixed length
- indexable
usage:
- sequential data
- IO routines as buffers
- lookup tables and inverse lookup tables
- return multiple values
operation complexity:
access: O(1)
search: O(n)
insert: O(n)
append: O(1)
delet: O(n)
需要遍历的操作就是O(n)
Q: How to implement a dynamic array? A:
- static array with an initial capacity
- add new elements, keep tracking the size
- if exceed capacity, create a new static array with
twice the capacity- and copy the original elements into it
Singly and Doubly Linked Lists
单向/双向链表
sequential list of nodes that hold data which point to other nodes also containing data.
- 节点序列,
- 节点拥有指向别的节点的数据(指针)
- 别的节点也拥有这种指针
usage:
- many
List, Queue & Stackimplementations - circular lists
- model real world objects such as
trains - implementation of adjancy list for graphs
- separate chaining -> ?
- deal with hashing collisions -> ?
上述两上问号后续在
Hash Table一节里自然就解惑了
Terminology Head / Tail / Pointer / Node
Singly vs Doubly
- Doubly holds a
nextandprevreference, which Singly has noprev- 插入删除的时候需要更新所有引用
- both maintain a reference of
headandtailfor quick additions / removals
insertion
- create a traverser and move by sepcific steps
- create new node
- singly:
- 原node的next指向新node
- 新node的next指向原next的node
- doubly:
- 新node的next和prev分别指向原node和下一个node
- 两个node分别用next和prev指向新node
removal
singly需要两个游标:
- pt1指向head, pt2指向head->next
- pt1, pt2一起移动,直到pt2找到目标
- pt2再向前移动一步
- pt1位置的node用next指向pt2位置
- now can sefely remoing the element between pt1 and pt2
doubly却只需要一个:
- pointer找到目标元素
- 用prev和next找到上一个和下一个
- 下一个和下一个node分别互相指向
Complexity
searth: O(n)
insert at head/tail: O(1)
remove at head: O(1)
remove at tail: O(n) (singly) / O(1) (doubly)
因为即使我们知道tail在哪,在单向链表中,我们也找不到它的前一个去设置为新的tail
remove in middle: O(n)
Stack
- one-ended linear data structure (LIFO)
- two operation:
pushandpop
Usage
- undo mechanisms
- compiler syntax checking for matching brackets and braces
- 开括号压入栈内,每碰到一个闭括号,与栈顶的比较,匹配就出栈,不匹配就报错
- model a pile of books or plates
- 汉诺塔(tower of hanoi)
- tracking previous function calls
- DFS on a graph
Complexity
push/pop/peek/size: O(1)
search: O(n)
双向链表实现一个Stack,基本上就是操作tail
Queues
- a linear data structure, model real world queues (FIFO)
- two primary operations:
enqueue,dequeue
Usage
- any waiting line models a queue
- keep track of the x most recently added elements -> ?
- web server request management where you want first come first serve
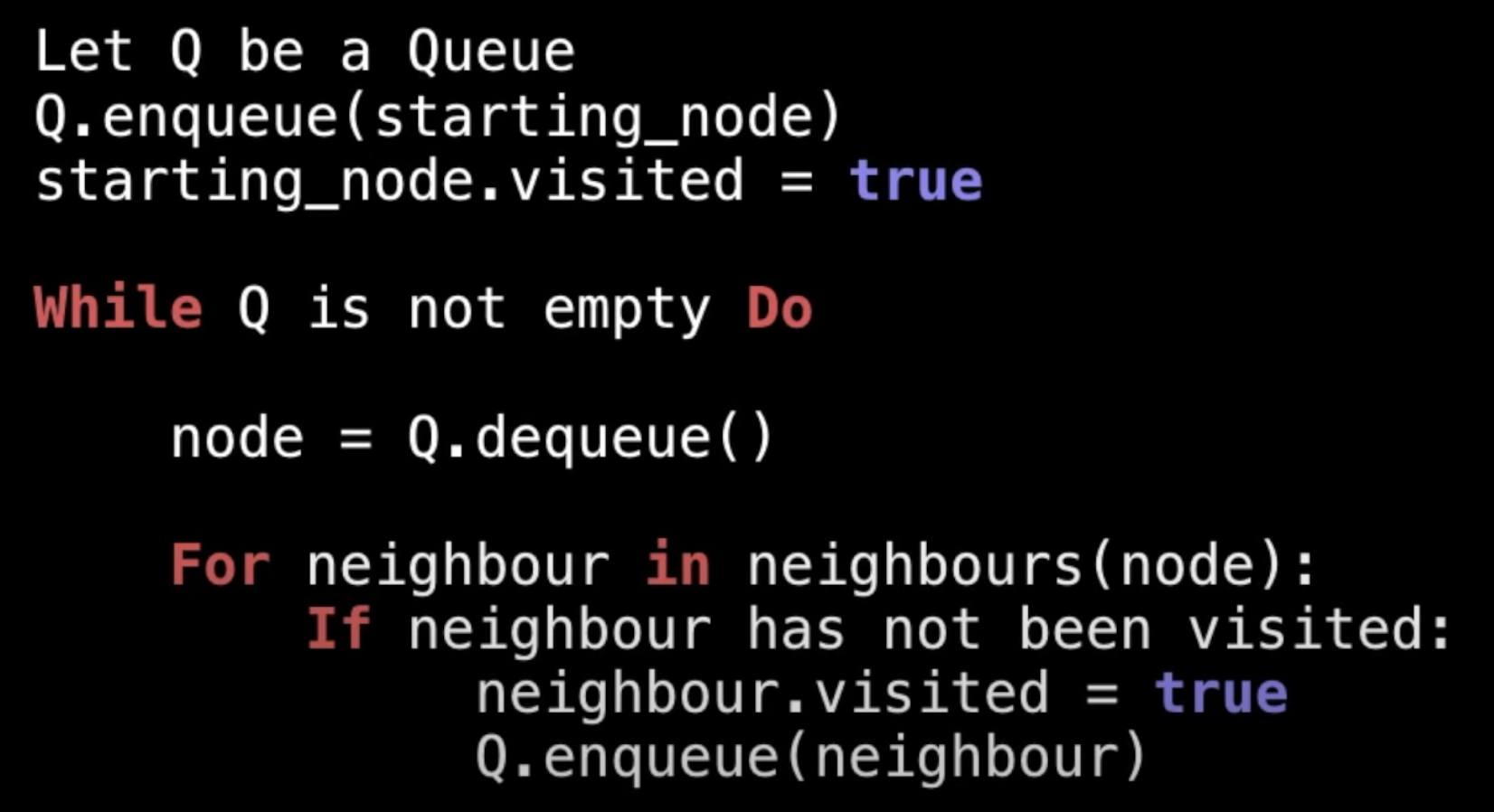
- BFS graph traversal
Complexity
只有contains, revomval需要遍历,其它操作(出入列等)都是O(1)
实现一个BFS:
基本就是动态往 queue 里添加子节点,当前级别元素访问完后, 再 dequeue 出来的就是所有的下一级子节点
双向列表实现Queue,入列用tail,出列用head,即添加的总在尾巴,永远从头部取出。
Priority Queues (PQs) with an interlude on heaps
- A priority queue is an
Abstract Data Type(ADT) - except each element has a certain priority
- determine the order (removed from the PQ)
- need
comparable data
每次取出最小(或最大)的->pool,添加到PQ,如何得知极值呢?-> heap
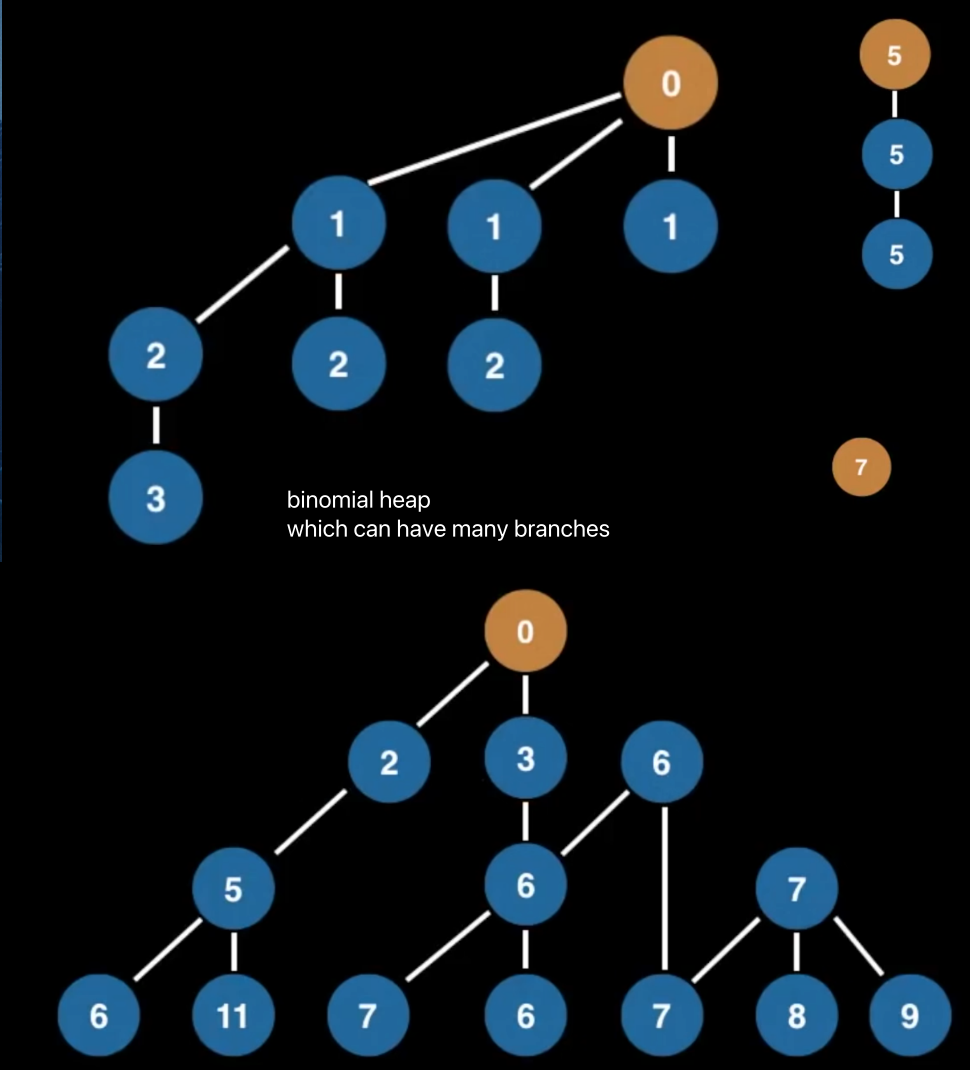
Heap
- a tree based data structure
- statisfies the
heap invariant(heap property):- if A is a parent node of B then A is
ordered with respect ot Bfor all nodes A, B in the heap - 说人话,A是B的父节点,如果A比B大,那么比B的所有子节点都大,vice versa
- if A is a parent node of B then A is
Priority Queue有时候也被叫做Heap,因为它只是一个ADT,当然它也可以用别的数据结构实现。
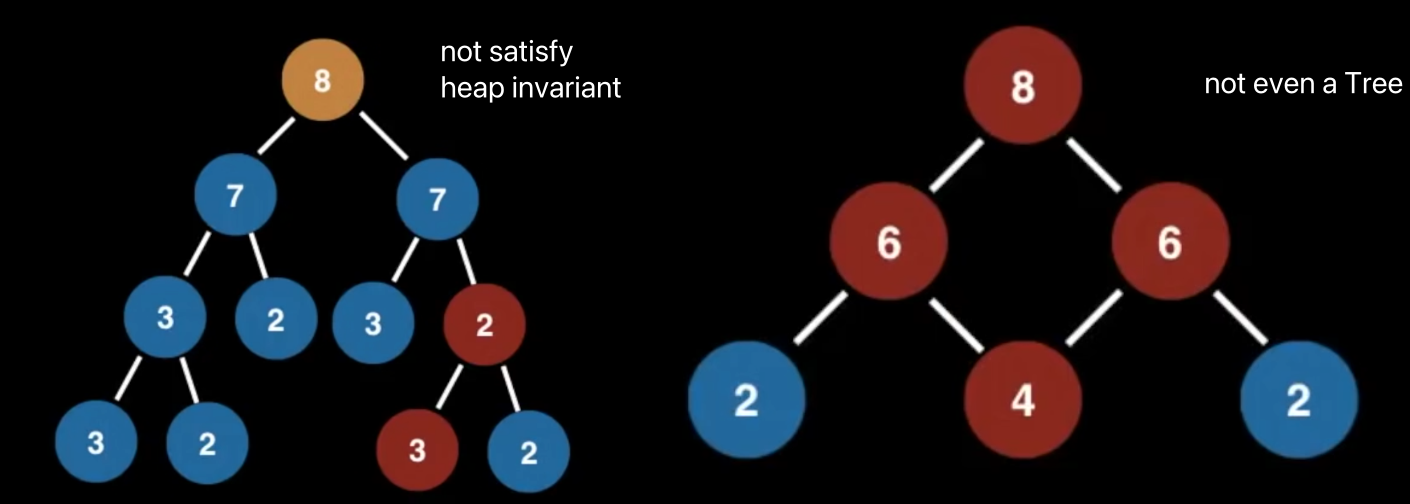
以下四个,都是heap
 这些就不是
这些就不是
Usage
- certain implementations of
Dijkstra's Shortest Path algorithm - anytime you need the dynamically fetch the next
bestorworstelement Huffman coding-> lossless data compression- BFS,PQs
continuously grab the nextmost promising node Minimum Spaning Tree(MST) algorithm
可见是很多算法的基础
Complexity
- Binary Heap construction: O(n)
- Polling: O(log n)
- Peeking: O(1)
- Adding: O(log n)
- 原生删除:O(n)
- with hash table: O(log n)
- 原生contains: O(n)
- with hash table: O(1)
Turning Min PQ into Max PQ
大多数编程语言标准库只提供了min PQ。
- 在构建min pq的时候,把比较标准从
x>=y变成x<=y(operator重载) - 在构建min pq的时候,把x变成
-x,取出的时候再取反一次
原则都是取巧,而且,第二种方法,存在pq里的,并不是你要使用(和本想存储)的对象,所以取出的时候需要处理。
Priority Queue with Binary Heap
实现了heap invariant的binary tree.
除了Binary Heap,还有很多
- Fibonacci Heap
- Binomial Heap
- Paring Heap
- ... 都能实现一个PQ
Adding Elements to Binary Heap
- 从尾部(last leaf)添加
- 如果违反了heap invairant(即比parent大),则交换
- 向上冒泡
Removing Elements From a Binary Heap
- Poll()
- 因为root总是优先级最高的元素,
poll移掉的就是root - root当然不能直接移,所以先跟最后一个元素swap
- swap后原root就没有children了,直接移除
- 最低优先级的元素到了top,所以要向下冒泡
- 先左后右,先低再高
- 即如果两个子级优先级一样,那么直接与左边交换
- 否则哪个优先级最低就与哪个子级交换
- 子级优先级都比它低,就完成了pool()
- Remove(m) 即删除一个特定元素
- linear scan,找到元素位置
- 与last node交换,然后移除
- last node用先上向下的原则冒泡
- 即先看能不能往上冒泡,不能的话再看往下冒泡
Complexity Pool(): O(log n) Remove(): O(n) (最坏情况下,可能要删的元素在最后一个)
用hashtable优化remove
- hashtable为lookup和update提供constant time
- 因为为Index和value建立了映射,这样不需要通过遍历,直接通过映射就能找到元素
- 如果两个node拥有同样的value呢?
- 直接把每个value对应的n个索引全部存起来(set)
- 但我应该remove哪一个呢?
- 随便,只要最终satisfy the heap variant
Union Find
- keep track of elements in different sets
- primary operations:
findandunion
Usage
- Kruskal's minimum spanning tree algorithm
- Grid percolation
- Network connectivity
- Least common ancestor in trees
- Image processing
Complexity
- construction: O(n)
- union/join/size/check connected/: (n) :接近常量时间
- count: O(1)
给定一个无向图,如果它任意两个顶点都联通并且是一棵树,那么我们就称之为生成树(Spanning Tree)。如果是带权值的无向图,那么权值之和最小的生成树,我们就称之为最小生成树(MST, Minimum Spanning Tree)。 -> 用最少的边连接所有的顶点
- sort edges by ascending edge weight
- walk through edges
- 检查顶点,如果两个顶点都已经unified,就忽略
- 其实就是这两个点分别被别的边连过了
- 否则就添加edge,并且unify顶点
- 检查顶点,如果两个顶点都已经unified,就忽略
看到这里,首先想知道什么是unified,看实现,也就是在一个集合里(component)
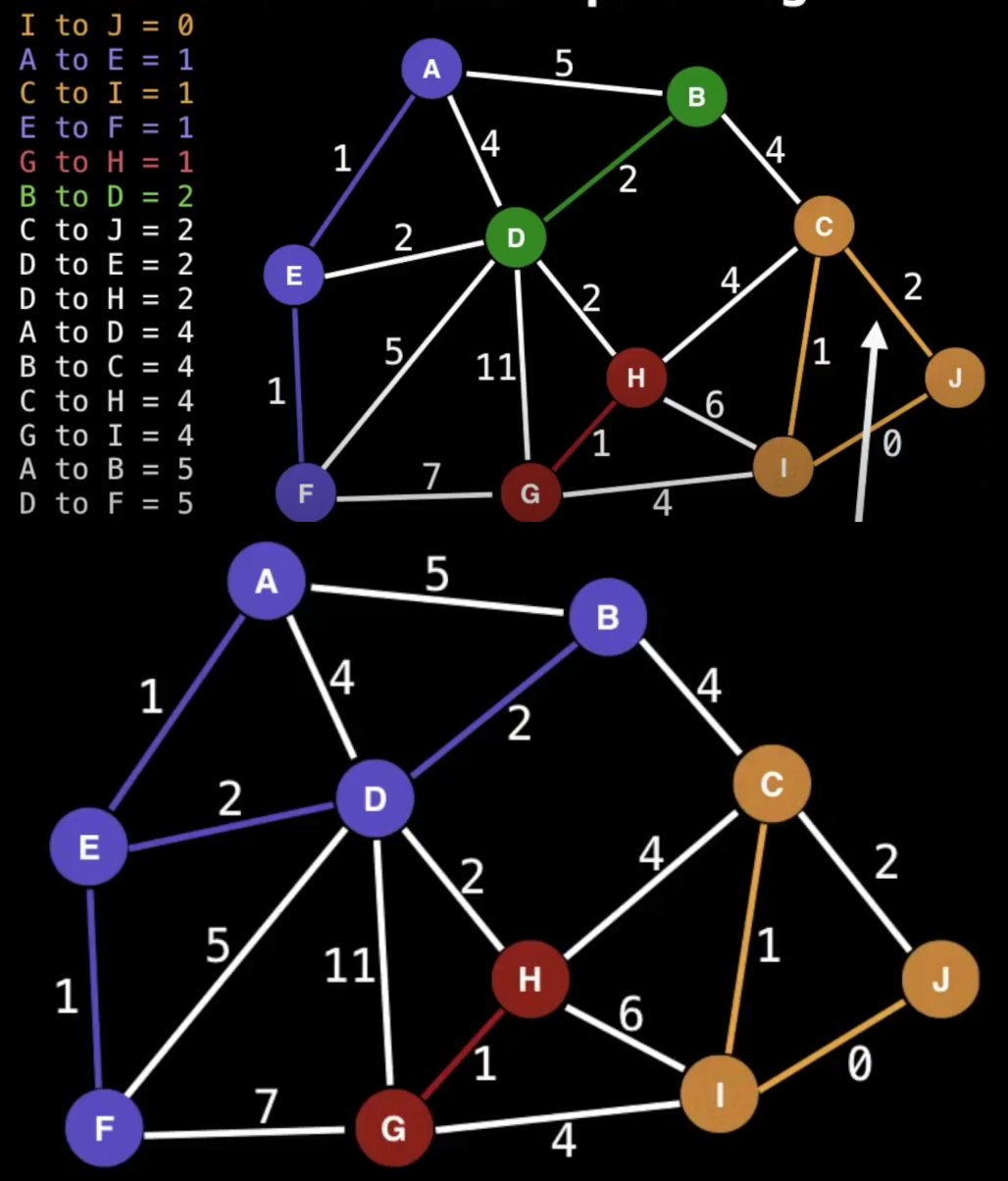
- 观察C_J,因为C和J已经在一个组里了,这条边就不需要了
- 观察D_E,一旦连上后,紫色和绿色其实就是一个组了
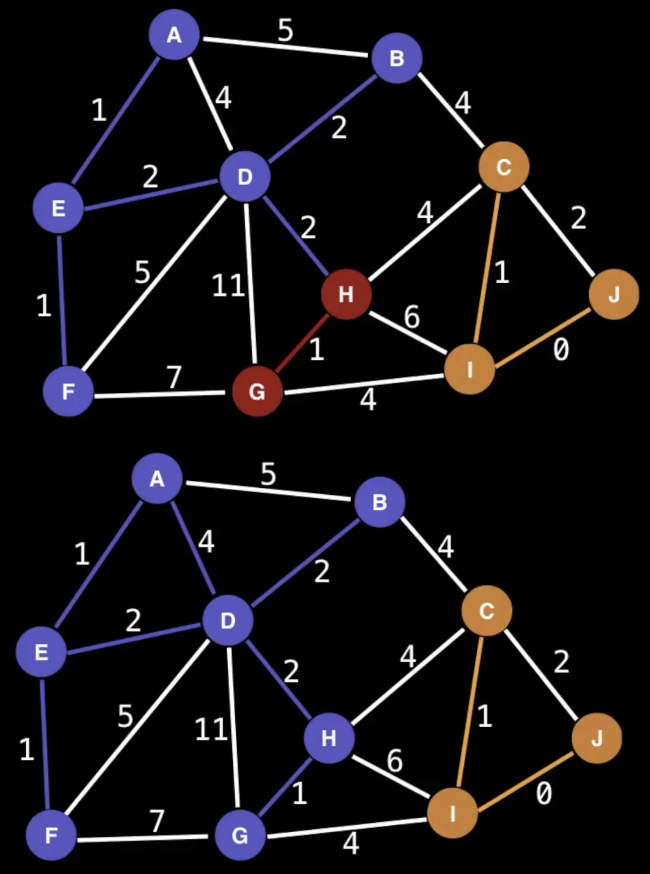
- 观察D_H,一旦连上后,紫色和红色也成为了一个组
- 连接B_C,所有顶点就全部连上了,并且只有一条紫线
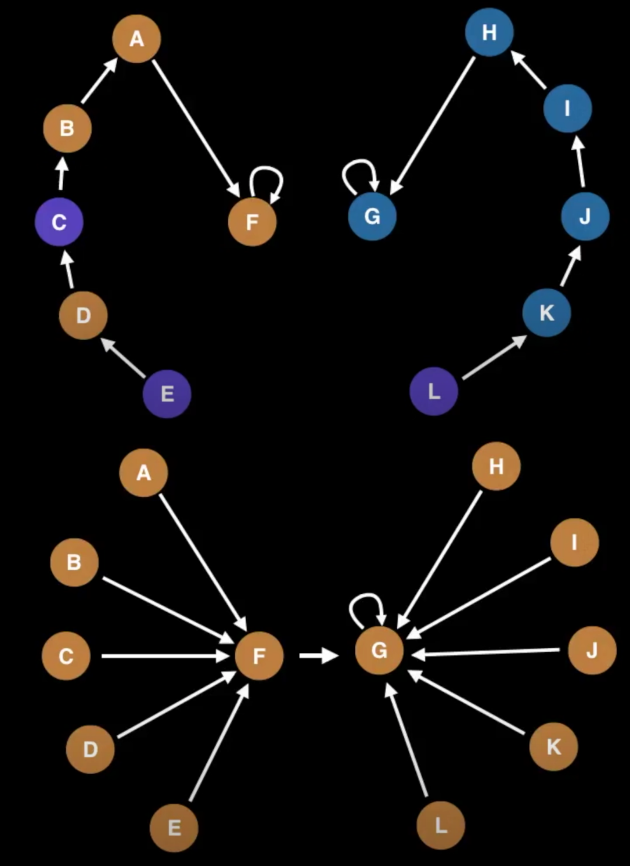
Find: 找元素在哪个component里,然后找到它的root Union: 找两个元素分别在哪个component里,然后找到它们的root,如果不是同一个root,就让其中一个成为另一个的parent
- component的个数与root的个数一致
- root的个数只减不增(因为通常只合并而不拆分)
union find里
- 为每个元素分配一个索引,每个元素指向自己(即初始是n个root,n个component)
- 描述两两之间的关系,以任一元素为parent (谁来描述?)
- 有一个元素已经属于别的component里的,就将它也加到那个component里去
- 如果这个元素也是别的component里的顶点,就把整个组指向另一个组的root
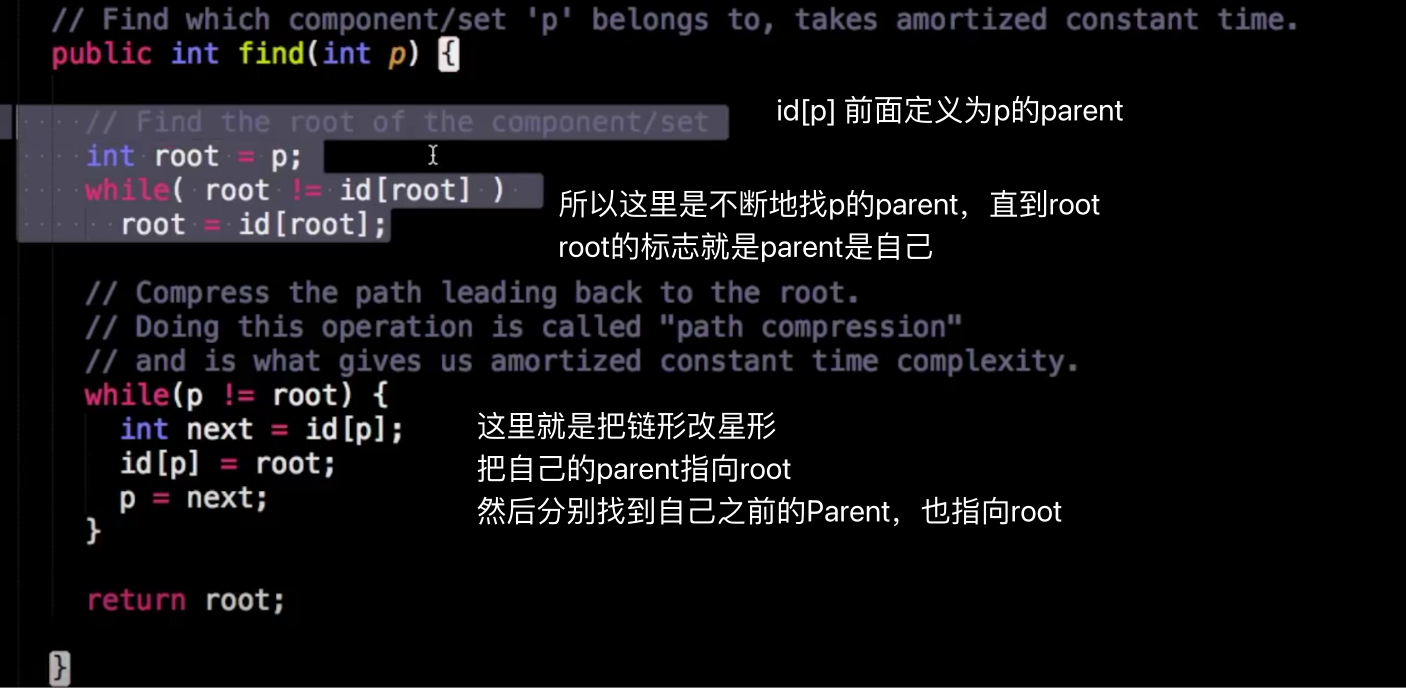
Path Compression Union Find
 由一层层找到root改为所有顶点直接指向顶点(星形结构),实现路径压缩
由一层层找到root改为所有顶点直接指向顶点(星形结构),实现路径压缩
这段代码演示的是,查找p的root节点,在查找的过程中,顺便进行了路径压缩
合并的逻辑就是比较谁的元素多就把谁当作root,另一个component的root的parent设为元素多的组的root
合并完成后组数就少了1
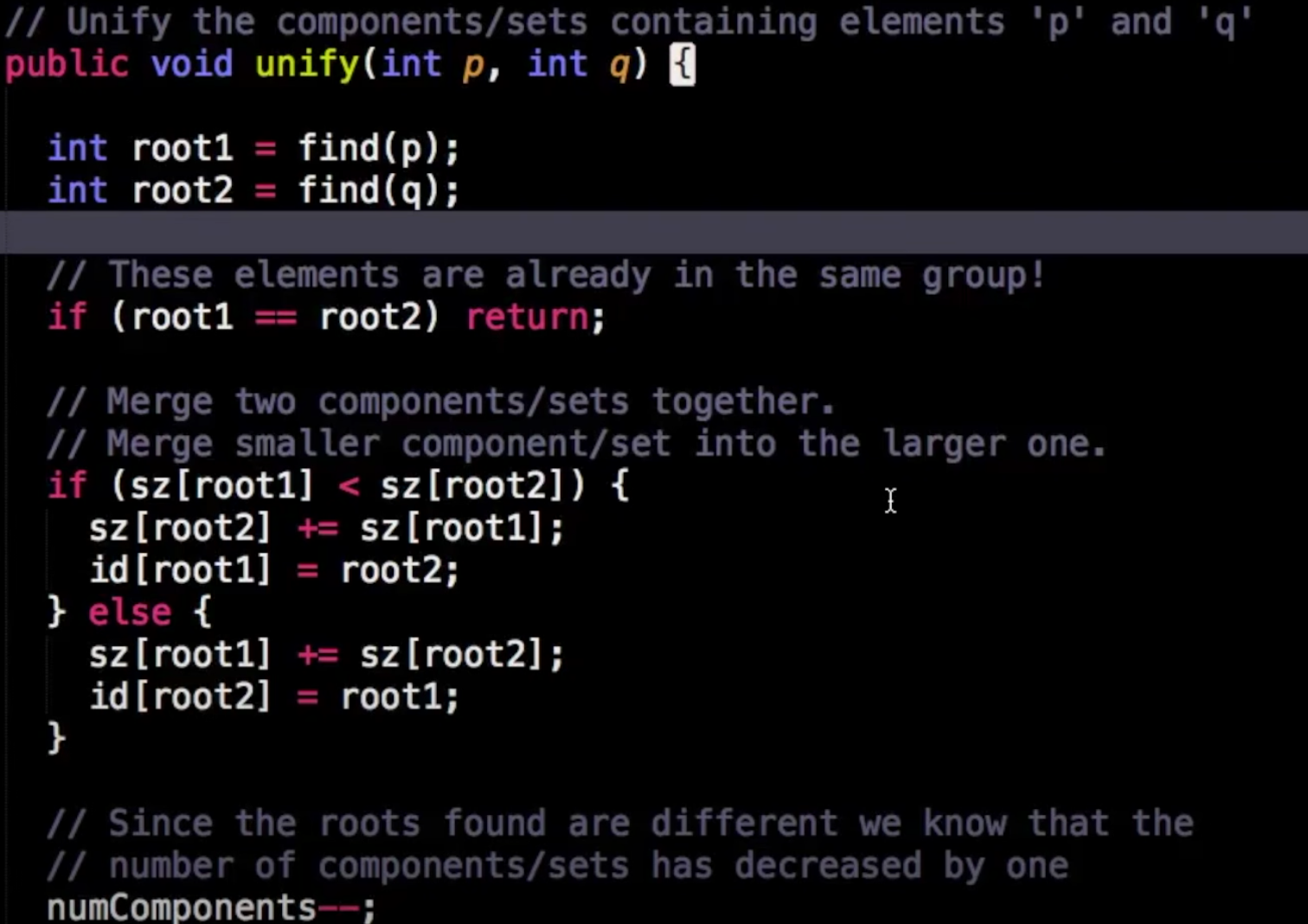 看代码,这一步里面并没有路径压缩,也就是小组里面的元素并没有进一步再星状地指向新的parent,仍然指向的是老的组的root
看代码,这一步里面并没有路径压缩,也就是小组里面的元素并没有进一步再星状地指向新的parent,仍然指向的是老的组的root
Binary Trees and Binary Search Trees (BST)
Tree: 满足以下定义的undirected graph(无向图)
- An acyclic(非循环的) connected graph
- N nodes and N-1 edges
- 有且只有一条路径连接任意两个顶点
任意一个节点都可以被理解为root
Binary Tree 拥有最多两个节点的Tree
Binary Search Tree
服从以下特性的binary tree
- 左子树的元素小于右子树
拥有重复元素是允许的,但多数情况下我们只研究不重复的元素
这是一个有效的BST吗?
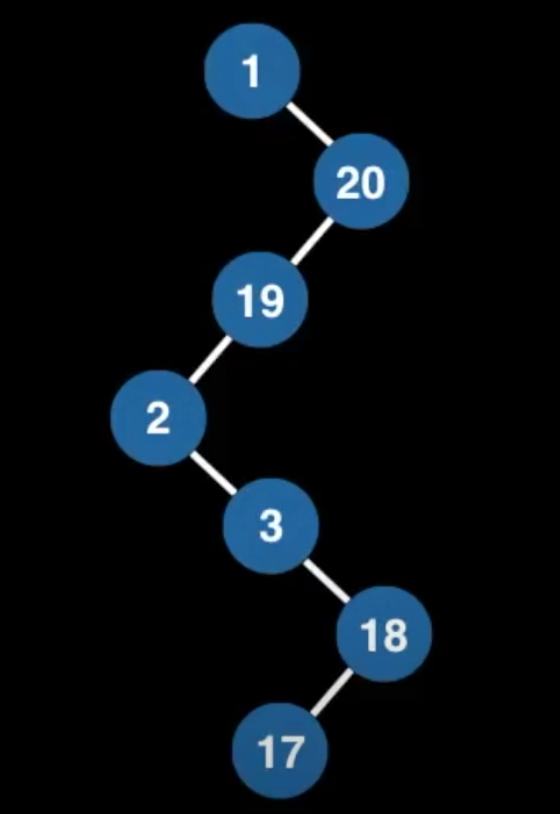
是的(对于单链下来的,几乎会直接就满足右边比左边大)
Usage
- BSTs
- implementation of some map and set ADTs
- red black trees
- AVL trees
- splay trees
- ...
- binary heaps
- syntax trees (by compiler and calculators)
- Treap - a probabilistic DS (uses a randomized BST)
Complexity 增删查平均为O(log n),但最差情况下都为O(n),即线性时间
Adding elements to a BST
- 第一个为root
- 每一个新数,比顶点大,放右边,比顶点小,放左边,顺序下行
- 不是从左到右摆满再做subtree
- 比如3,6,9, 会得一棵全部数字摆在右边的数,而不是顶3左6右9的三角形
- 这也是为什么极端情况下,时间复杂度是
O(n),因为就是一条线到底 - 这也是
balanced binary search trees被引入的原因
Removing elements from a BST
- find
- 从root开始,小的走左右,大的走右边
- replace (to maintain the BST invariant)
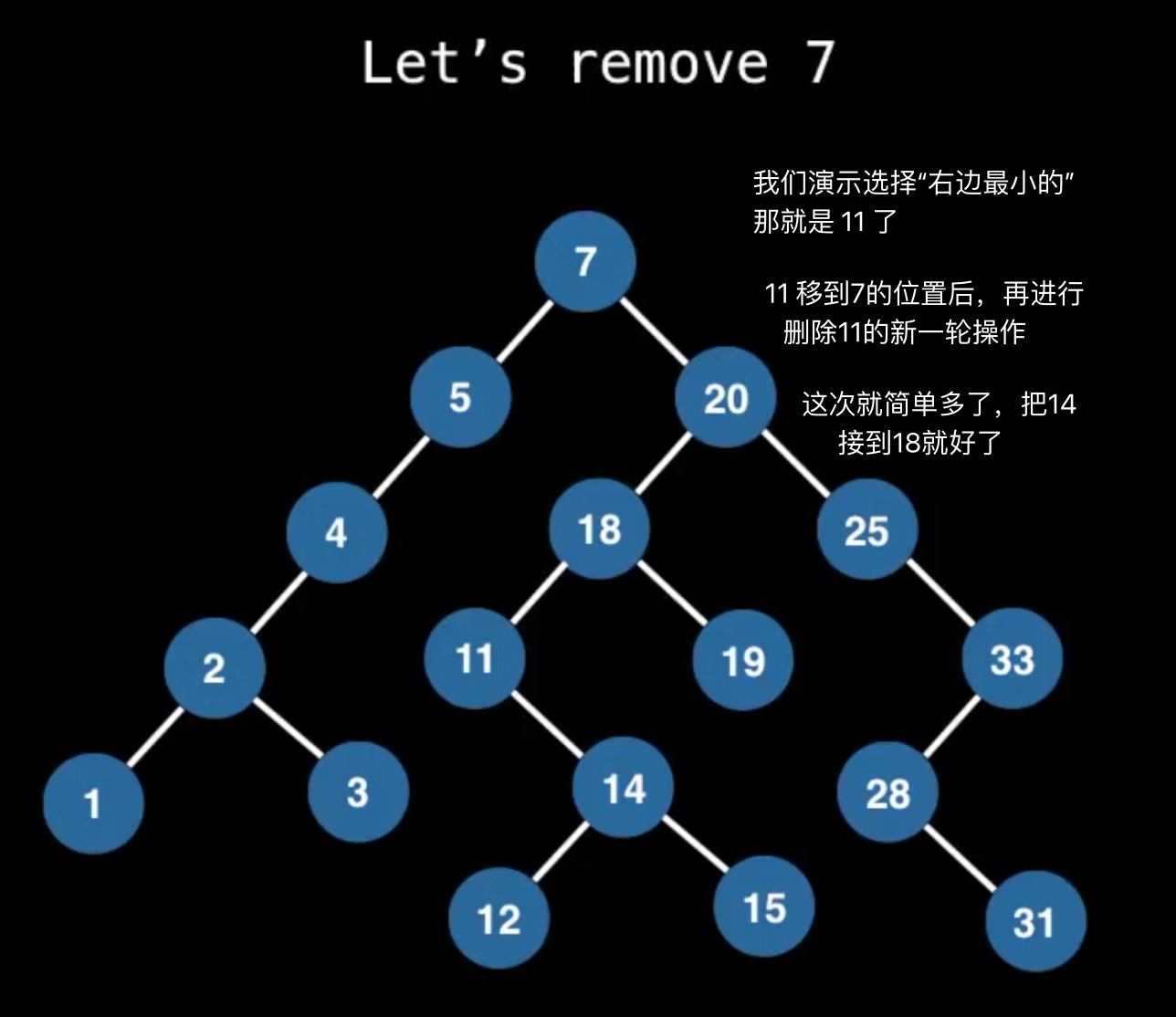
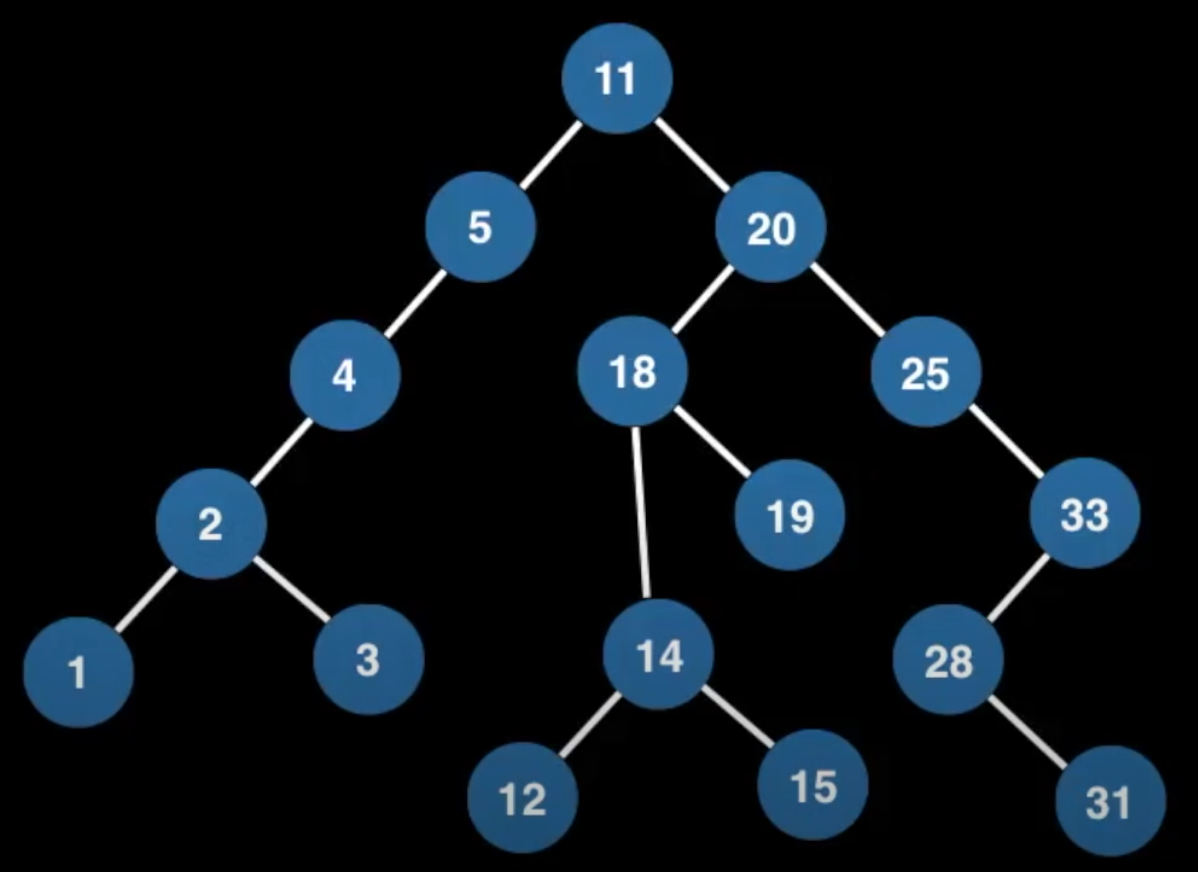
找继任者的时候,如果删除元素没有子节点,只有左或右子节点,都很好办,但如果它有两个子节点,那么应该用哪个来接续呢?
原则仍然是要服从左边的比右边的小,所以你其实有两种选择:
- 把左边最大的数选出来 或
- 把右边最小的数选出来
因为它们的“来源”,肯定是能保证bst invariant的
* 这个数是要替换这个节点的,所以要比这个节点左边的数都大,及比右边所有的数都小,显然就是左边的最大数,或右边的最小数了。 * 只是把找到的元素复制过去后,多了的那个怎么办呢? - 递归 新找到的元素当然要从原来的位置删除,这时又根据它是否叶节点,单子节点还是全节点,来反复进行前面的操作,最终总是可以退出的
Tree Traversals
(Preorder, Inorder, Postorder & Level order)
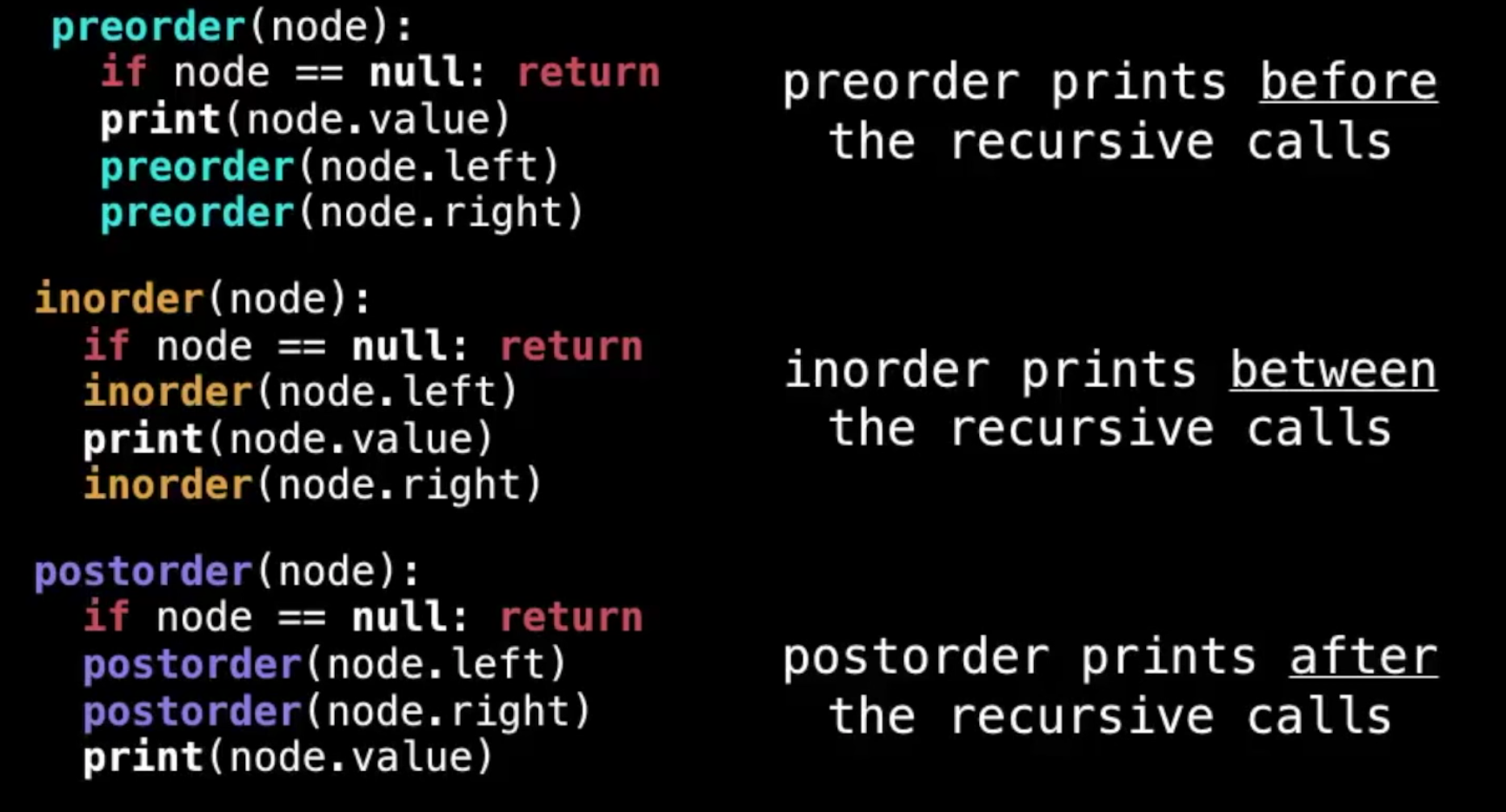
- preorder,在遍历左侧元素的时候,每次已经先取到元素了(最顶层)
- inorder里,遍历元素的时候,直到所有的left走完了,才取到第一个元素(最底层的)
- postorder里,也是遍历到最底层,但是下一步就是取兄弟节点了
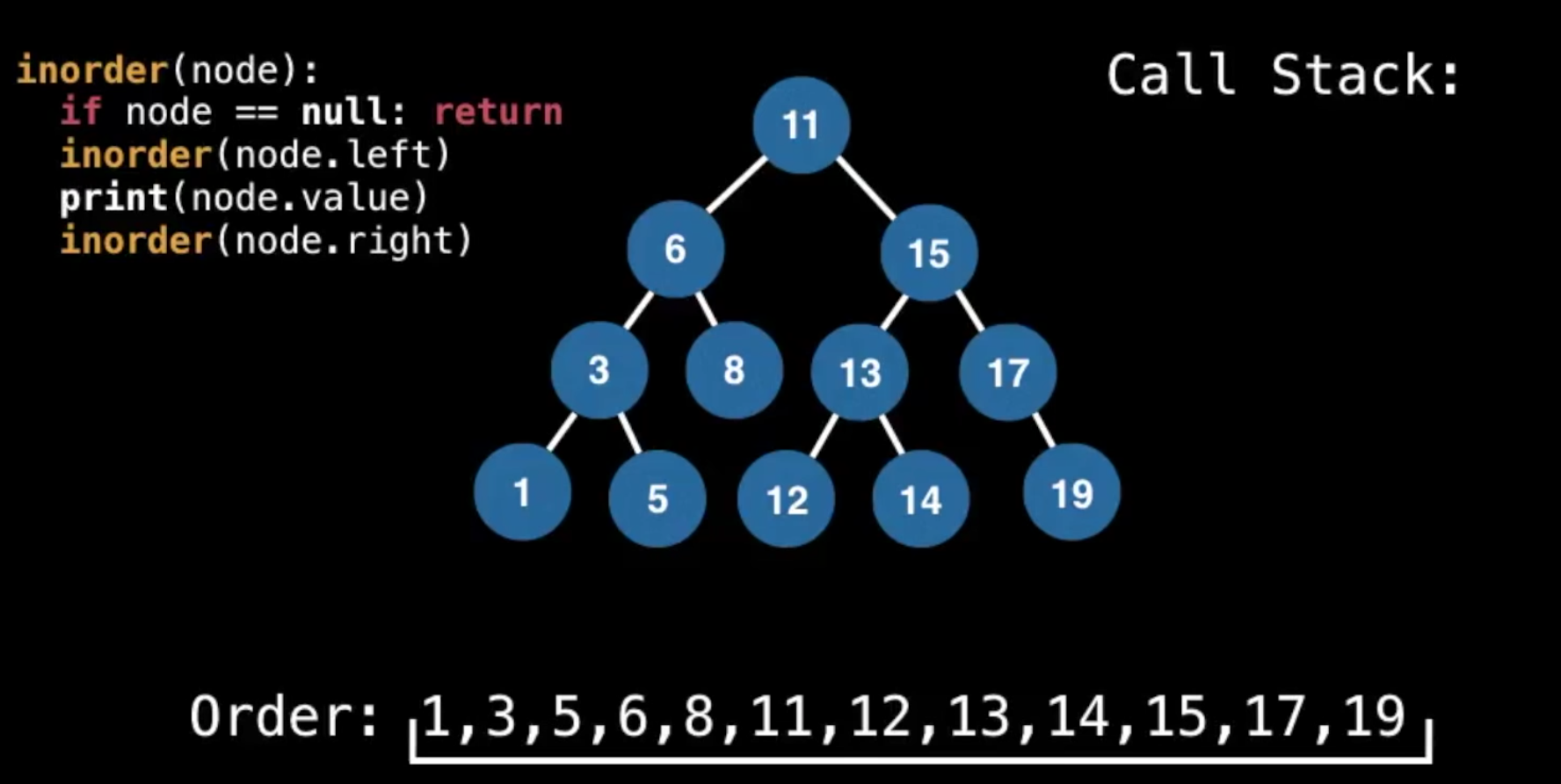 inorder一个重要特征:它是从小到大排好序的!
inorder一个重要特征:它是从小到大排好序的!
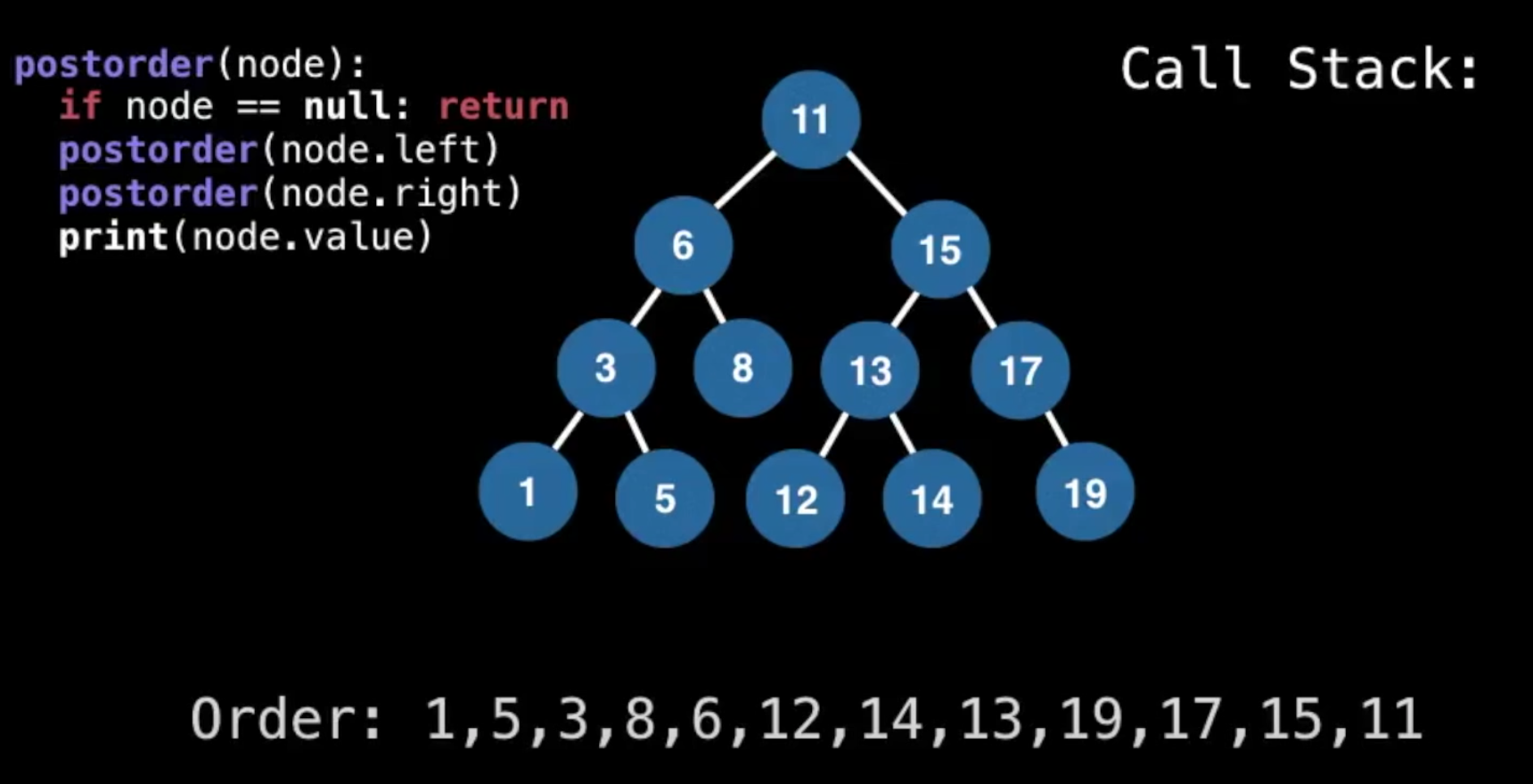 preorder 和 postorder没什么特征,举一个post的例子观察下
preorder 和 postorder没什么特征,举一个post的例子观察下
而levelorder则是一层一层地取的:
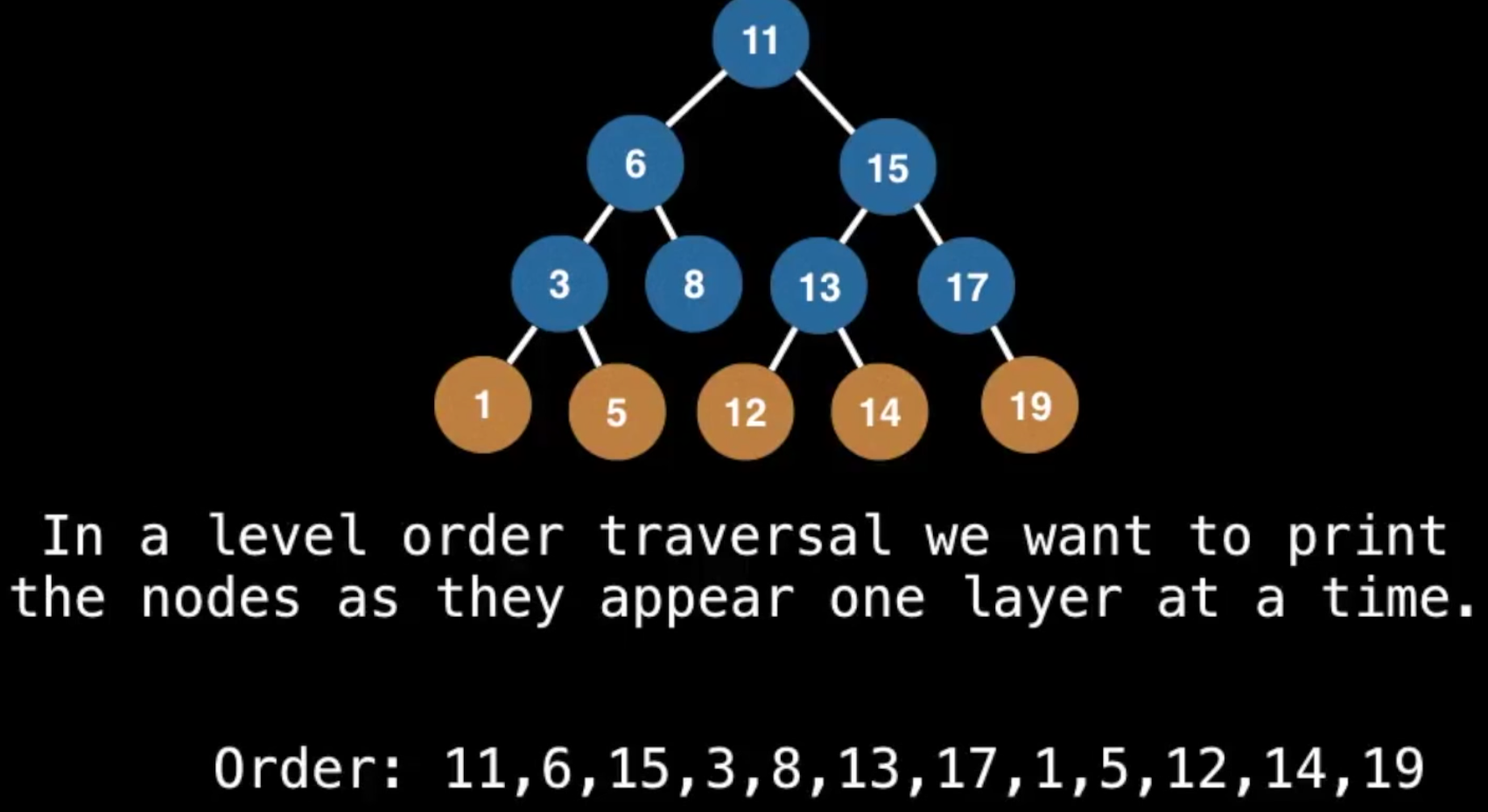 这就是广度优先了(
这就是广度优先了(Breadth First Searth)BFS
实现BFS
- 每处理一个parent的时候,把parent加到结果数组里
- parent的子节点加到队列里
- 每次从队列里取出一个值加到结果数组里(步骤1)
- 该值的child加到队列里(步骤2)
其实就是步骤1,2的重复,比如:
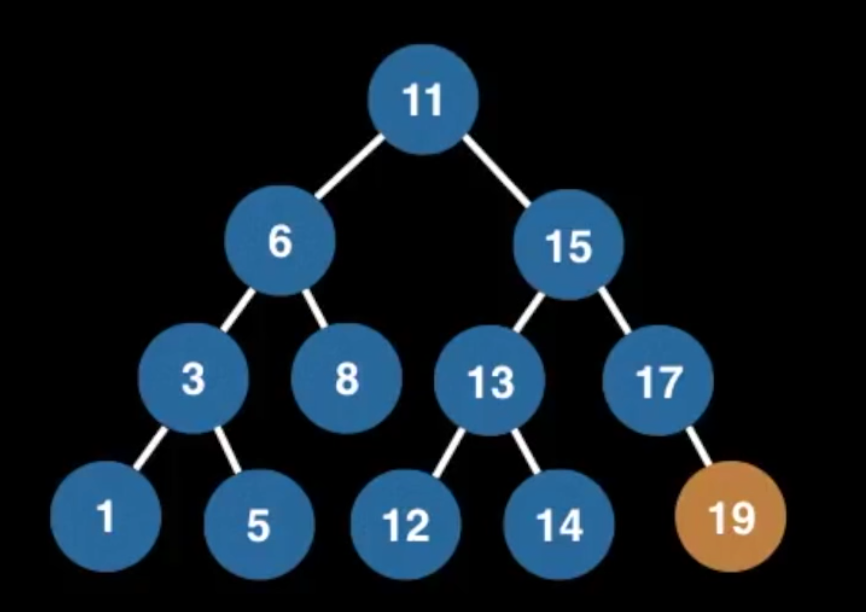
[11], [6, 15] 处理第1个数11, 队列里多了两个元素6, 15
[11, 6], [15, 3, 8] 从队列里取出6, 加入结果,它的子元素(3, 8)加入队列
[11, 6, 15], [3, 8, 13, 17]
[11, 6, 15, 3], [8, 13, 17, 1, 5]
[11, 6, 15, 3, 8], [13, 17, 1, 5] 这一步,8没有子节点了,队列变短了
[11, 6, 15, 3, 8, 13], [17, 1, 5, 12, 14]
[11, 6, 15, 3, 8, 13, 17], [1, 5, 12, 14, 19] 17只有一个child
[11, 6, 15, 3, 8, 13, 17, 1, 5, 12, 14, 19] 剩下的都没child了,全部拼进去
Hash Tables
- key-value pair
- using
Hashingtechnique - often used tracking item frequencies
what's hash function?
- maps a key
xto a whole number in a fixedrange.- e.g. maps (0, 9)
- 这个方程会为不同的x产生一样的y ->
hash collision
- can hash arbitrary objects like string, list, tuple...
- must be
deterministic(确定的x产生确定的y)- 因此key的应该是
immutable的类型
- 因此key的应该是
关键词是range,你设计的function总要mod一下,将结果限制在一个范围内。这里你应该暂时能推测出hashtable的key可能就是数字吧?
hash collision
separate chaining用一种数据结构(通常是链表)保留所有冲突的值open addressing为冲突的值选择一个offset(地址/值)保存 ->probing sequence P(x)
不管是怎么解决冲突,worst的情况下,hash table的操作时间也会由O(1)变成O(n)
怎么用HT来查找呢?不是把hash后的结果拼到原数据上,而是每次查询前,对key进行一次hash function,就能去查询了。
Open Addressing
probing sequences
- linear probing: P(x) = ax + b
- quadratic probing: p(x) =
- double hashing: p(k, x) = 双重hash
- pseudo random number generator: p(k, x) = x * rng(H(k), x) 用H(k)(即hash value)做种的随机数
总之就是在这样一个序列里找下一个位置
假设一个table size 为N的HT,使用开放寻址的伪代码:
x = 1
keyHash = H(k) # 直接计算出来的hash value
index = keyHash # 偏移过后存在HT里的index
while table[index] != None:
index = (keyHash + P(k, x)) % N # 加上偏移,考虑size(N)
x += 1 # 游标加1
# now can insert (k,v) at table[index]
Chaos with cycles
Linear Probling (LP)
LP中,如果你运气不好,产生的序列的下一个值永远是occupied的状态(一般是值域小于size),就进入死循环了。
假设p(x) = 3x, H(k) = 4, N = 9 那么H(k)+P(x) % N 只会产生{4,7,1},如果这三个位置被占用,那就陷入了永远寻找下一个的无限循环中。
一般是限制probing function能返回刚好N个值。
当p(x)=ax的a与size的N互质,即没有公约数,
GCD(a, N) = 1一般能产生刚好N个值。(Greatest Common Denominator)
注意,为了性能和效率的平衡,有
load factor的存在,所以到了阈值,size就要加倍,N的变化,将会使得GCD(a, N) = 1的a的选择有变化,而且之前对N取模,现在取值也变发生变化,这时候需要重新map
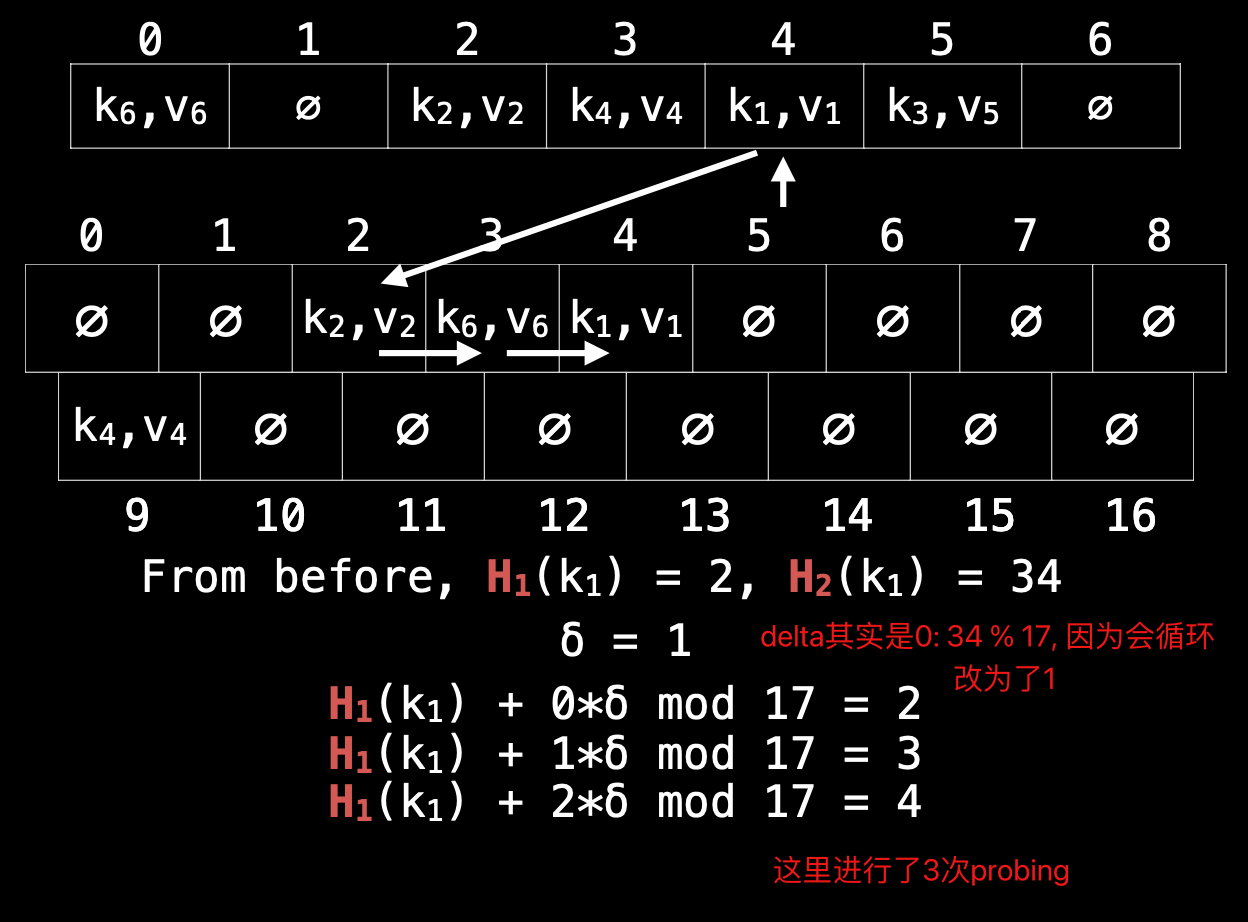
重新map不再按元素当初添加的顺序,而是把现有HT里的值按索引顺序重新map一遍。比如第一个是k6, 即第6个添加进来的,但是现在第一个就重新计算它的值,填到新的HT里面去。
Quadratic Probing (QP)
QP 同样有chaos with cycles的问题,通用解决办法,三种:
- p(x) = , size选一个 prime number > 3, and
- p(x) = , keep the size a power of 2 (不需要是素数了)
- p(x)= , make size prime N mod 4 ???
Double Hashing
Double Hashing: P(x) = 可见仍然类似一个一次的线性方程,就类似于ax中的a,设为,相比固定的a, 这里只是变成了动态的,这样不同的key的待选序列就是不一样的(可以理解为系数不同了)
解决chaos:
- size N to be a prime number
- calculate: mod N
- 时offset就没了,所以需要人为改为1
- and GCD(, N) = 1
可见,虽然系数是“动态”的了,但是取值还是(1,N)中的一个而已,hash只是让其动起来的一个原因,而不是参与计算的值。
我们本来就是在求hash value,结果又要引入另一个hash function,显然这个不能像外层这样复杂,一般是针对常见的key类型(string, int...-> fundamental data type)的universal hash functions
因为N要是一个素数,所以在double size的时候,还要继续往上找直到找到一个素数为止,比如N=7, double后,N=14,那么最终,N=17
Issues with removing
因为冲突的hash value需要probing,probing的依据是从序列里依次取出下一个位置,检查这个位置有没有被占用,那么问题就来了,如果一个本被占用的位置,因为元素需要删除,反而变成没有占用了,这有点类似删除树节点,不但要考虑删除,还要考虑这个位置怎么接续。
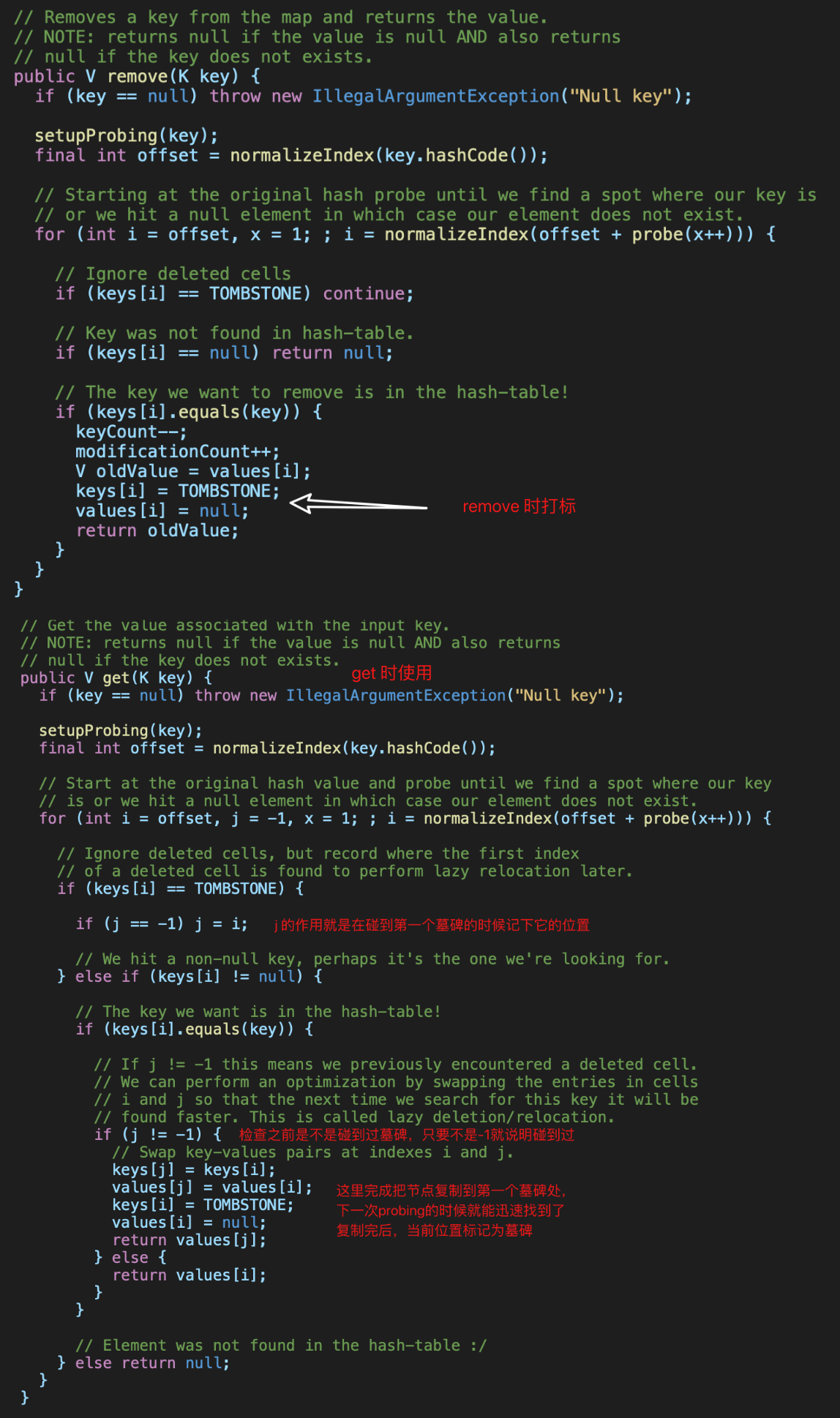
lazy deletion
但HT机制比树要复杂,为了避免反复应用probing函数重新摆放后续所有节点,干脆就在删除的位置放置一个预设的标识,我们称为墓碑(tombstone),而不是直接置空,然后所有的查找和添加加上这一条规则,就能快速删除又无需重新排序。
大量删除会造成空间浪费,但无需立即处理:
- 添加元素允许添加到墓碑位置
- 到达阈值容量需要倍增的时候有一次重排,这个时候就可以移除所有的墓碑
如果查找一个hash value,连续3个都是墓碑,第4个才是它,这是不是有点浪费时间?确实,所以还可以优化,当你查找过一次之后,就可以把它移到第一个墓碑的位置,这样,下次查询的时候速度就会快很多了。
整个机制,叫lazy deletion
Fenwick Tree (Binary Indexed Tree)
树状数组
Motivation
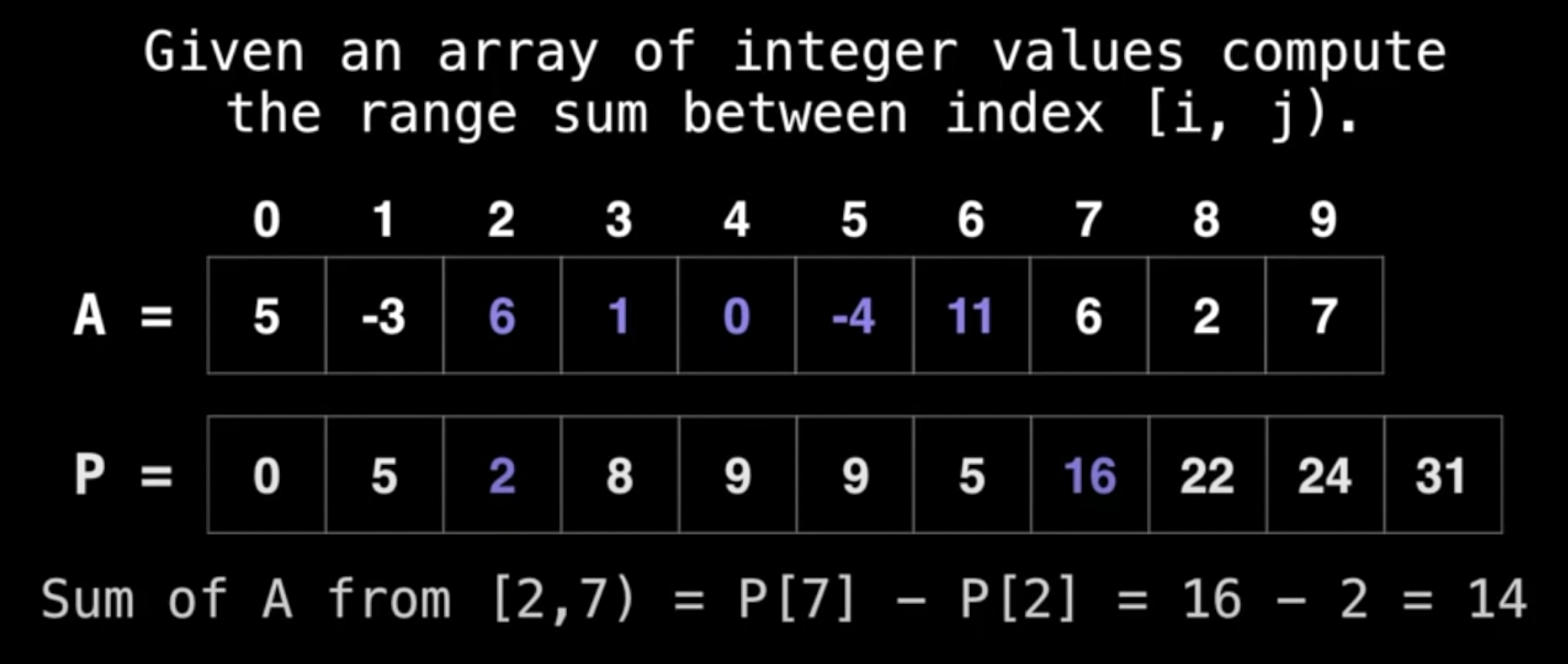
- 计算数组里任意连续片段的和,最直观的方案当然是累加O(n)
- 但是如果你有一个记录了每个节点到当前位置时的累加和的数组(
prefix sum),立刻变成了常量时间 - 问题更新数据变成了线性时间(后续所有的求和都要改一变)
- great for
static arrays
- great for
所以: Fenwick Tree is an efficient data structure for performing range/point queries/updates.(即在上面的动机上,还考虑了update的效率)
前面的例子在update时效率不高,所以Fenwick Tree用了一种聪明的方式,不是累加所有的值,而是分段累加,具体实现看下图:
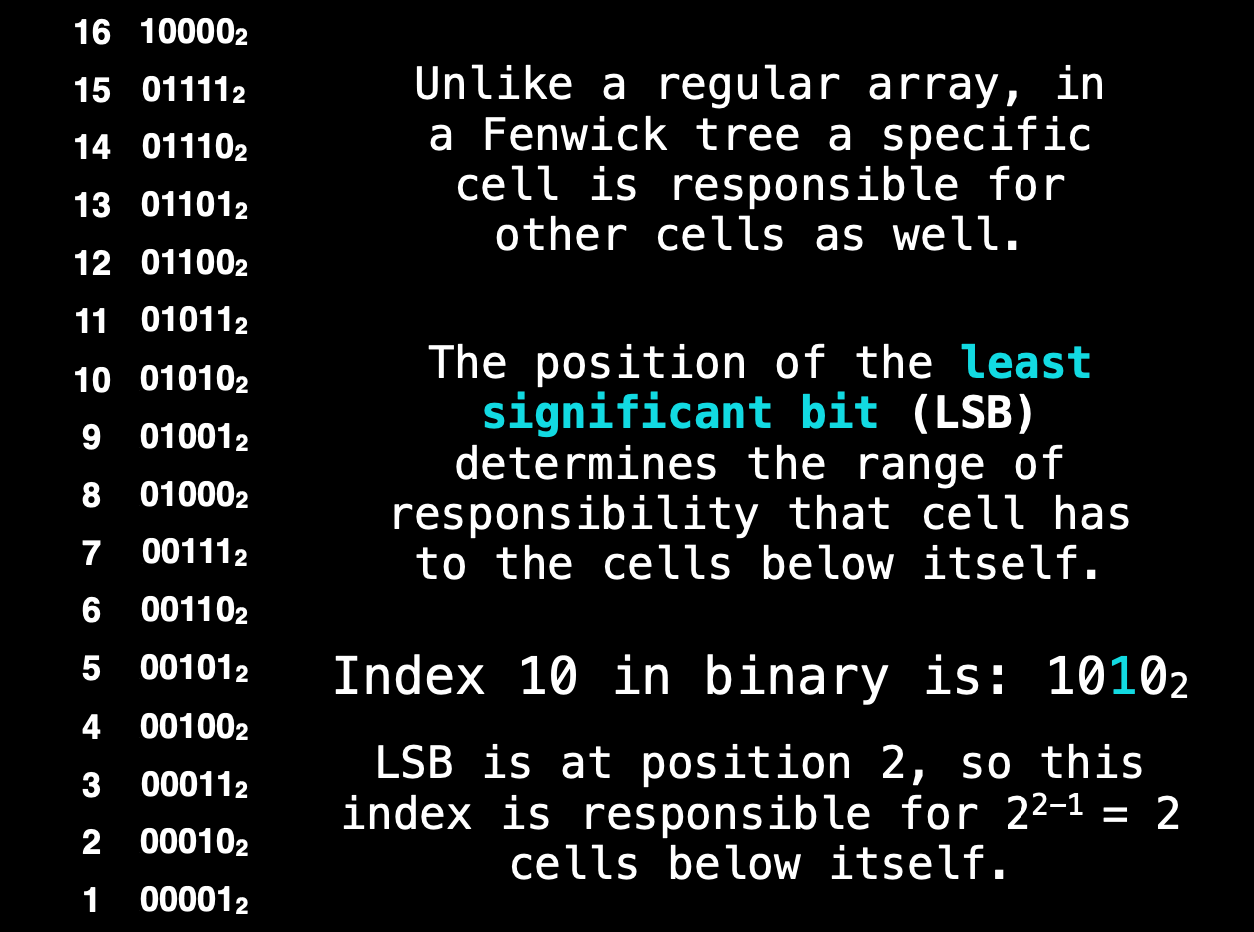
- 把索引值用二进制表示
LSB的解释看图,实际应用上,就是看从低位到高位第一个1的右边有几个0,假设为n个- 那么该cell上存的值就是前个cell的值的和
例子是索引10, 二进制是1010, 最右边有2个零,那么它保存它4个位置的和。 也就是说,如果你要求和,如果用了cell 10位置的值的话,至少可以省掉3次累加。
当然,它还有更牛逼的特性,结合range query一起来看吧:
 蓝线表示的是当然位置上累加了前几个位置的值,已经很有规律了
蓝线表示的是当然位置上累加了前几个位置的值,已经很有规律了
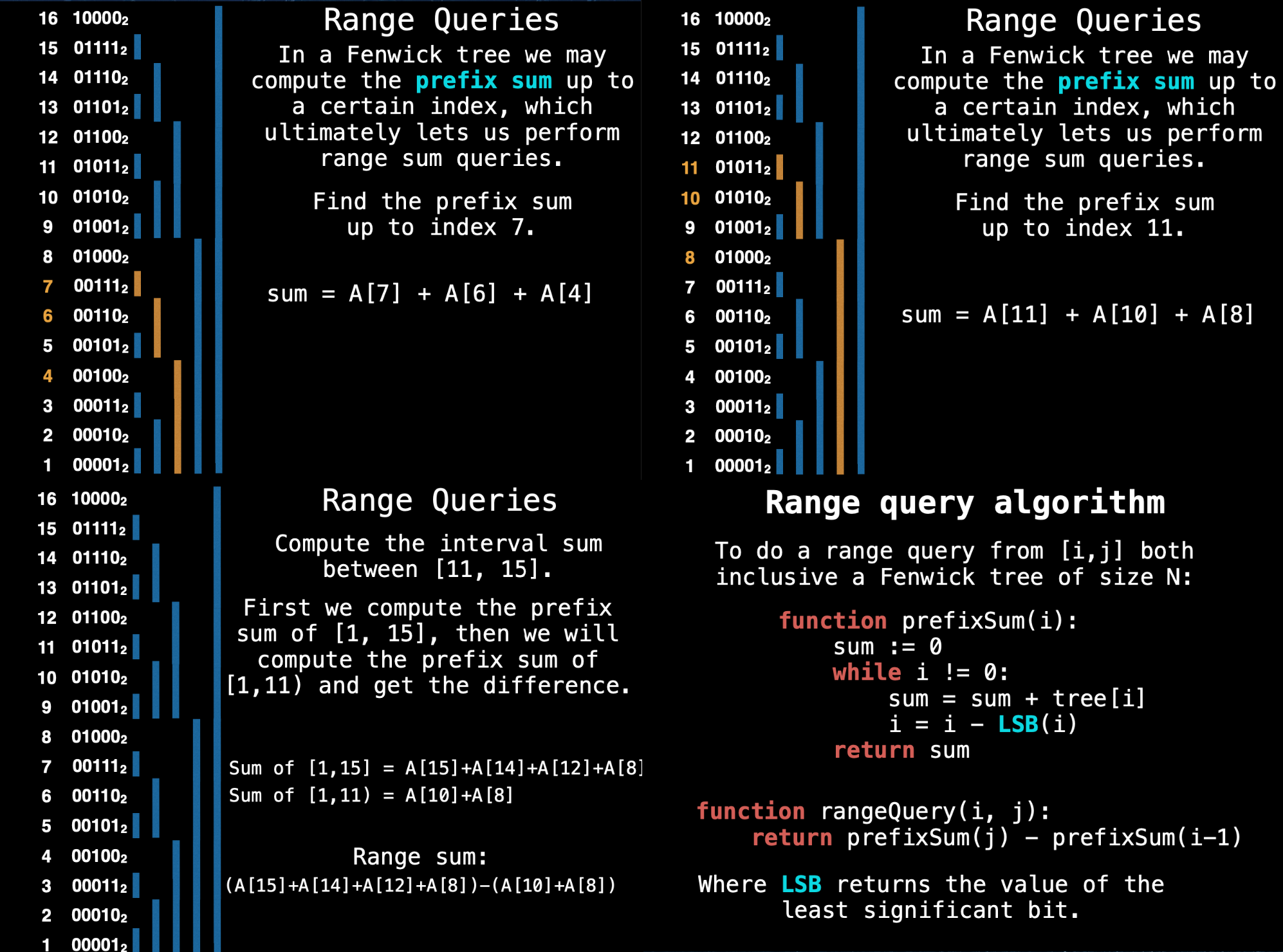
假如计算前11个值的和,过程是:
- 11的索引是1011,右边没有0,所以当前的和为A[11]
- 根据来移位,来到10。
- 右边一个0,所以它管个presum,目前A[11] + A[10]
- 下一个索引自然要减2了,来到8
- 8是1000,3个零,所以它存了个值的和,那就是全部了
所以:sum = A[11] + A[10] + A[8]
- 心算sum(0,7)巩固一下
- 用sum(11,15)演示子区间,其实就是多减1次,至于是减到10还是减到11,看描述,比如这里11是要参与计算的,那就是把前10个减掉就行了。
上面演示的都是worst的情况,即首位为1,除了这种情况,别的位都至少存了前个元素的值(比如16,直接得到16个元素的和)
这里都没讲你是怎么做这个tree的,而是怎么使用它。先弄清楚使用场景再谈构建。
Point Update
复习一下LSB,虽然可以直接数最右边的零的个数,但数学其实是:
- 13 = 1101 ($2^3 + 2^2 + 2^0 \Rarr 10^3 + 10^2 + 10^0 $)
- 减去最右边的1和0 => 1100 () 所以下一个数是12
- 减去最右边的1和0 => 1000 就是8了
- 再减就是0了 而按来计算个数的话就是这样的:
- 13 = 1101, 没有0,就是移1位,变成12
- 12 = 1100, 2个0, 就是移4位,变成8
- 8 = 1000, 3个0, 移8位,变成0
现在来讲update,前面知道,update会级联影响到所以把该cell考虑进去的节点,因此,它需要反着往上找(极端情况当然是找到最后一个元素,通常这个元素就是整个数组的值,所以任何元素的更改,肯定都会影响到它)
前面找下一个节点用的是减法,现在就要用加法了,比如我更新了cell 9, 用以上两种任意一种方法来计算:
- 1010 + 10 = 1100 = 12
- 1100 + 100 = 10000 = 16 到顶了, 所以需要把9, 10, 12, 16分别应用这个point的更新,也就是说只有这几个cell把9计算进去了。
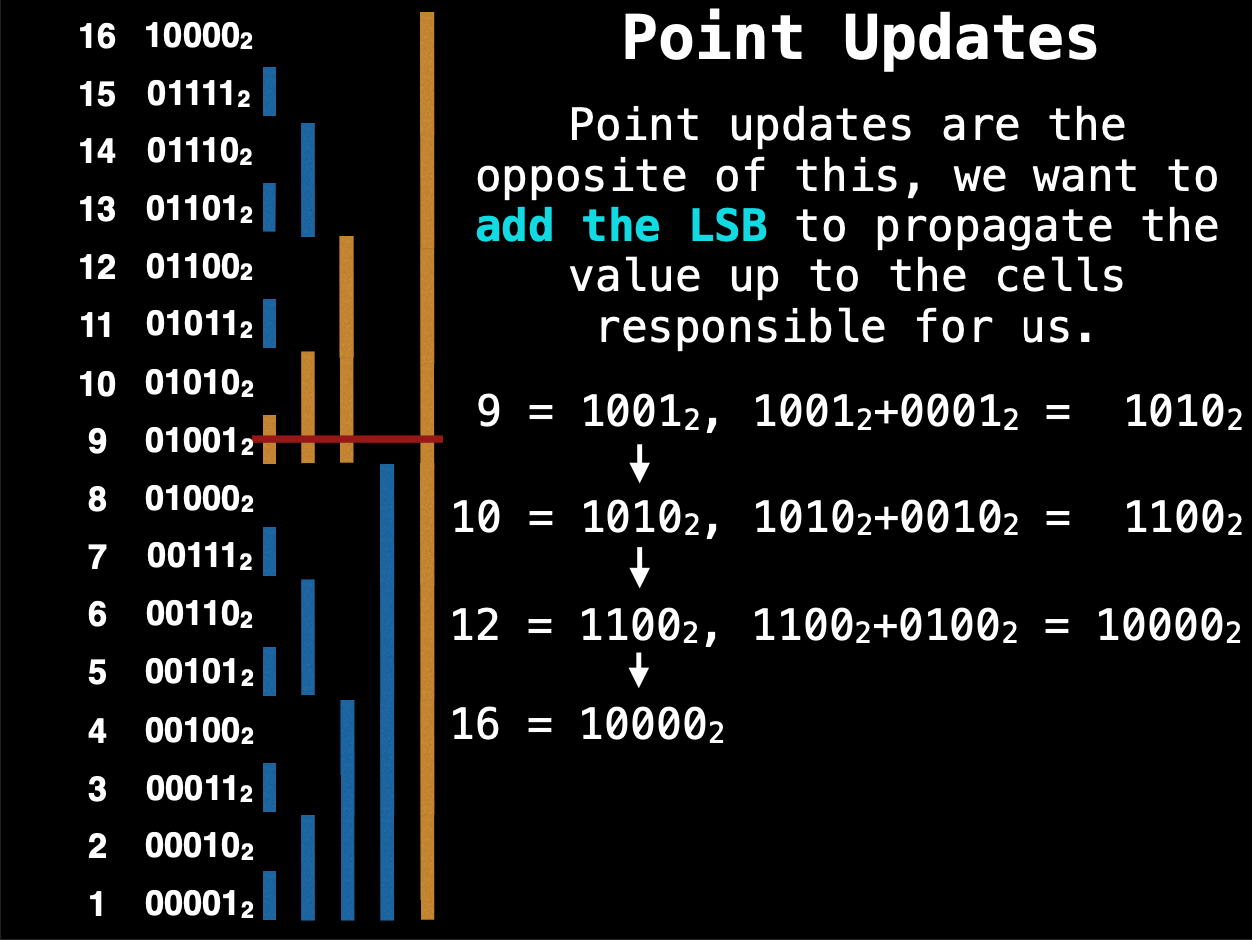 当然,可以看一下左边的示意图,更直观
当然,可以看一下左边的示意图,更直观
function add(i, x):
while i < N:
tree[i] = tree[i] + x
i = i + LSB(i)
代码非常简单,就是不断通过LSB找下一个位置去更新就行了。
Construction
现在来讲构建
function construct(values): N := length(values)
# Clone the values array since we’re # doing in place operations
tree = deepCopy(values)
for i = 1,2,3, ... N:
j := i + LSB(i)
if j < N:
tree[j] = tree[j] + tree[i]
return tree
几乎就一句话,就是把元素按原数据摆好(即不加别的节点)后,每次找到当前元素影响的上一级(不再向上冒泡)
- 比如1,把1算进去的有2,虽然上面还有4, 8, 16,但只把1更新到2
- 到2的上一级是4 (2 + lsb(2) = 4), 把节点2的现值(已经加了节点1)加到4去
- 所以核心算法始终只有两个变量,i,j代表最近的包含关系
一些算法换成位运算
- lsb(i):
i & -i - i -= lsb(i) =>
i &= ~lsb(i)
Suffix Array
- 字符串的所有子字符串后缀组成数组
- 对子串根据首字母进行排序
- 排序后原有的index就被打乱了
- 这个乱序的indices就是
Suffix Array
做尾缀子串的时候通常是从个字母开始越找越多,这就有了一个原生顺序,然后用首字母排序后,这个顺序就被打乱了
提供了一种compressd representation of sorted suffixes而无需真的把这些子串存起来。
- A space efficient alternative to a
suffix tree- a compressd version of a
trie?
- a compressd version of a
能做所有suffix tree能做的事,并加添加了Longest Common Prefix(LCP) array
Longest Common Prefix (LCP) array
继续上面的Suffix Array,字母排序后,我们一个个地用每一个元素同上一个元素比,标记相同前缀的字母个数,这个数字序列就是LCP
比如adc, adfgadc, 前缀ab是相同的,那就是2。
第一个元素没有“上一个”去比,所以LCP数组第1位永远是0?(是的,其实是undefined,但一般设0)
衡量的是相邻的suffix array元素的前缀间有多少个字母相同。
当前也可以和下一个元素比(这样最后一个元素的LCP肯定是0了,原理同上)
Find unique substrings
找到(或计数)一个数组的所有(不重复的)子元素。可以逐个substring遍历,,下面看看更快也更省空间的LCP方案。
找“AZAZA”的不重复子串:
A,AZ,AZA,AZAZ,AZAZA,Z,ZA,ZAZ,ZAZA,A,AZ,AZA,Z,AZ,A,把重复的标注了出来。
LCP是这样的:
LCP|Sorted Suffixes|
-|-
0|A
1|AZA
3|AZAZA
0|ZA
2|ZAZA
我们知道第一列指的是“重复个数”,也就是说,如果按我们手写的那样去遍历,至少有这么多重复的子串,重复的既是“个数”,也是“组合方式”。
所以如果我们只需要计数的话,把右边的数出来就知道有会有多少个重复的了,此例为6.
这是LCP的应用之一,利用了LCP本身就是在数重复次数的特征。
K common substring problem
n个字符串,找出一个子串,它至少是k个字符串的子串,求最大子串。
即如果有k=2,那么这个子串只需要是其中两个的子串就行了,如果k=n,那么就需要是每一个字符串的子串。
直接上图
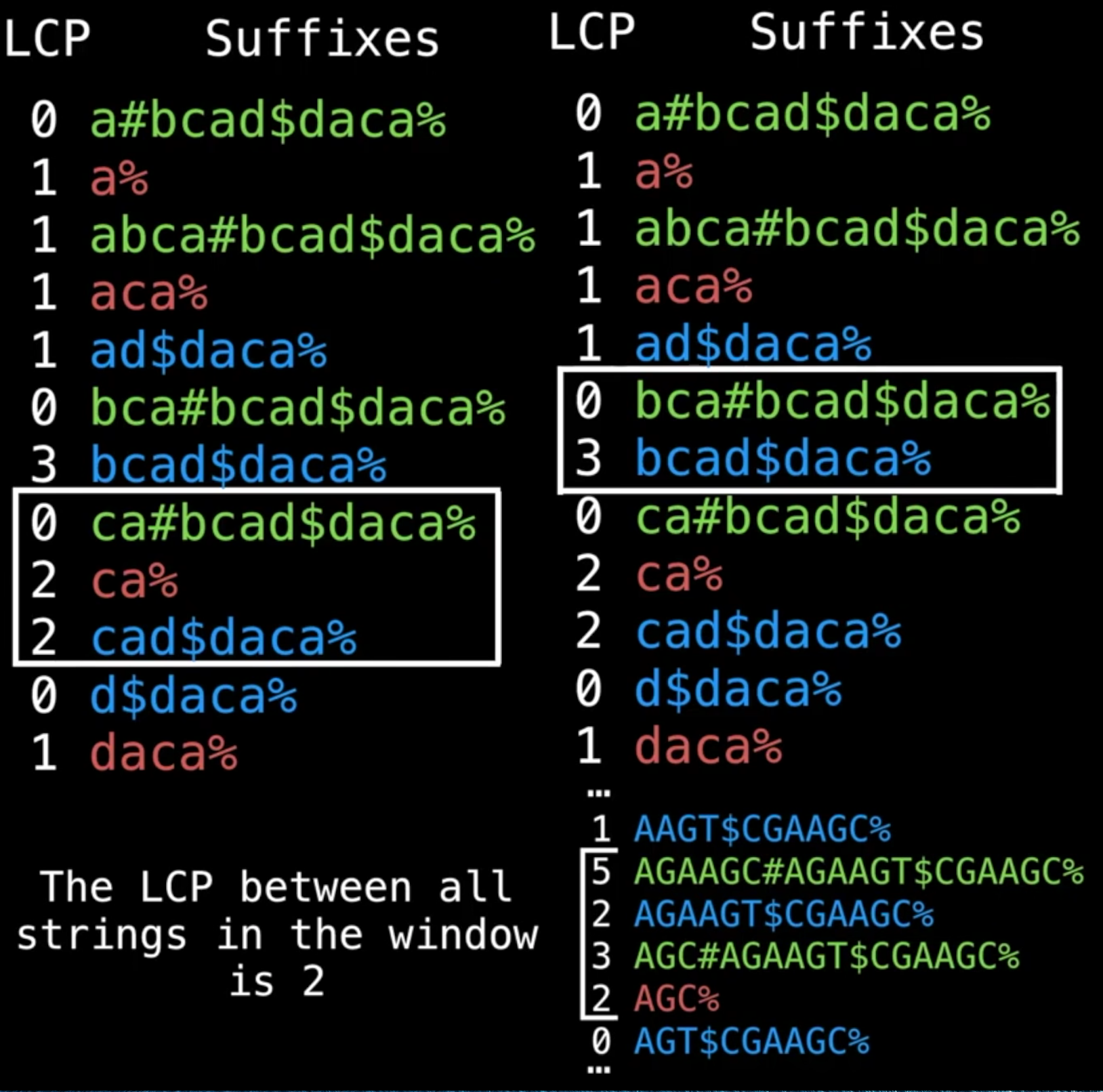
- 图1演示k=3时,找到了
ca,即3个串里都有的是ca - 图2演示k=2时,找到了
bca,即bca存在2个串里 - 图3演示的是用了size=4的滑窗才包含了3个字符串,以及最大匹配是
AG
步骤:
- 首先,用几个分隔符把字符串拼接起来
- 分隔符字符串里不会出现
- 分隔符的排序要小于所有字符
- 图中染色的依据是prefix是哪个串里的就染成什么颜色
- 开始滑窗比较
- 滑窗必须要能包含k种颜色
- 所以滑窗大小不是固定的,有时候相邻几个都是来自同一个字符串
- 滑窗里除0外的最小值,就是符合条件的最大共同长度,如图3,最大匹配长度是2
- 课程里动画演示滑窗其实不是用滑的,而是用的爬行
- 即下界往下,包含了所有颜色之后,上界也往下,这样蠕行前进,每一步判断滑窗里的内容
- 额外需要一个hash table来保存切片与颜色的映射关系。
- 如果是例子这么简单,我可以直接检查第一个出现的分隔符,是#就是绿色,出现$就是蓝色,%就是红色
核心就是:
- 取子串是从后向前取的
- 但比较是从前向后比的
- 前面的元素可能来自任何一个子串(只要足够长)
- 从前面排序,客观上就把来自不同字符串的相同字母打头的子串给排到一起了
这就是为什么在Suffix Array的内容里面出现Longest Common Prefix的内容的原因了.
聪明。
Longest Repeated Substring (LRS)
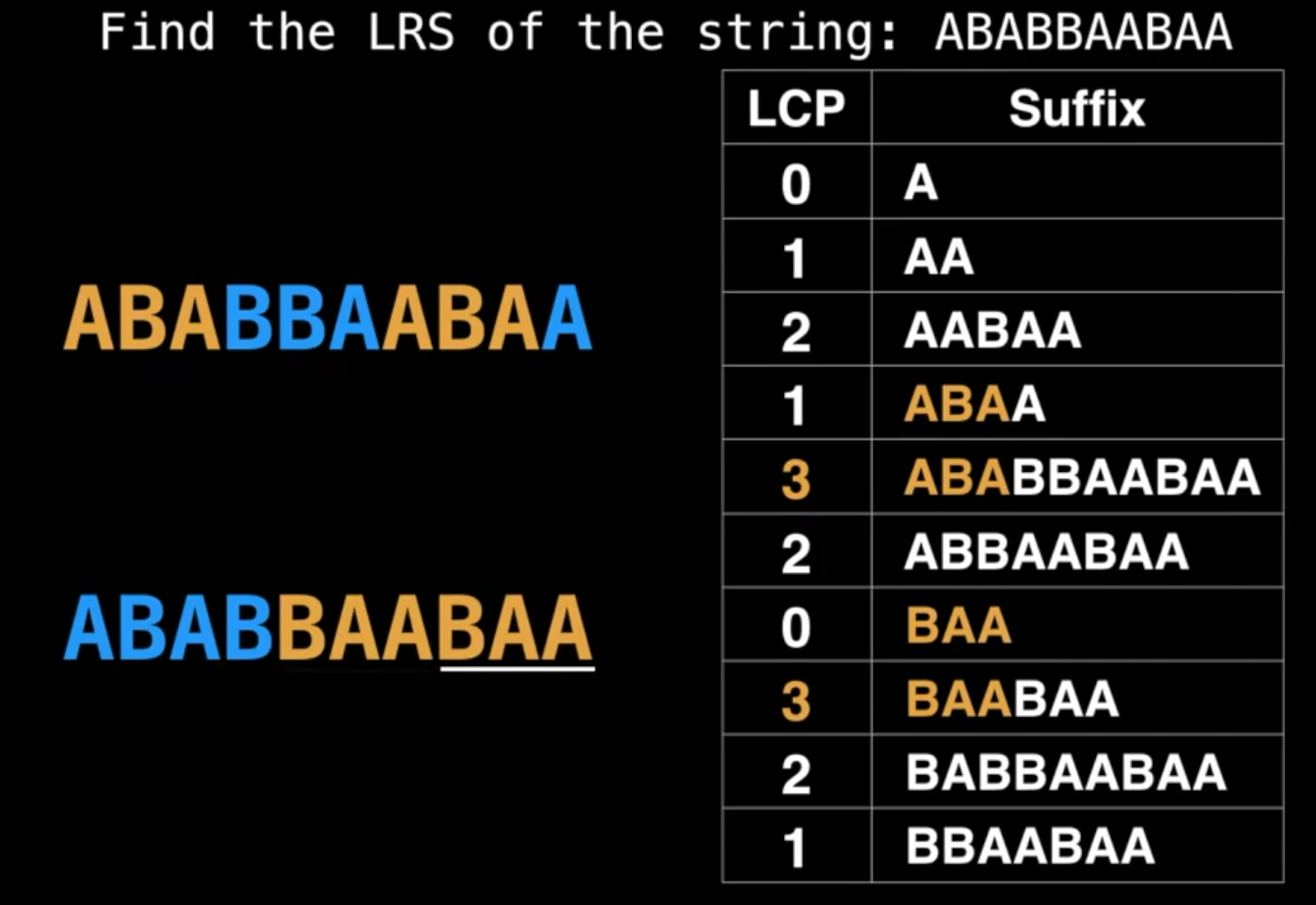
这个比暴力遍历要简单太多,直接找LCP最大值即可
Balanced Binary Search Trees (BBST)
- 满足low (logarithmic) height for fast insertions and deletions
- clever usage of a
tree invairantandtree rotation
AVL Tree
一种BBST,满足O(log n)的插入删除和查找复杂度,也是第一种BBST,后续出现的更多的:2-3 tree, AA tree, scapegoat tree, red-black tree(avl的最主要竞争对手)
能保持平衡的因子:Balance Factor (BF)
- BF(node) = H(node.right) - H(node.left)
- H(x) = height of node = # of edges between (x, furthest leaf)
- 平衡就是左右平均分隔,所以要么均分,要么某一边多一个,BF其实就是(-1, 0, 1)里的一个了 <- avl tree invariant
一个node需要存:
- 本身的(comparable) value
- balance factor
- the
heightof this node - left/right pointer
使树保持左右平衡主要是靠rotation,极简情况下(三个node),我们有两种基本情况(left-left, right-right),有其它情况就旋转一次变成这两种情况之一:
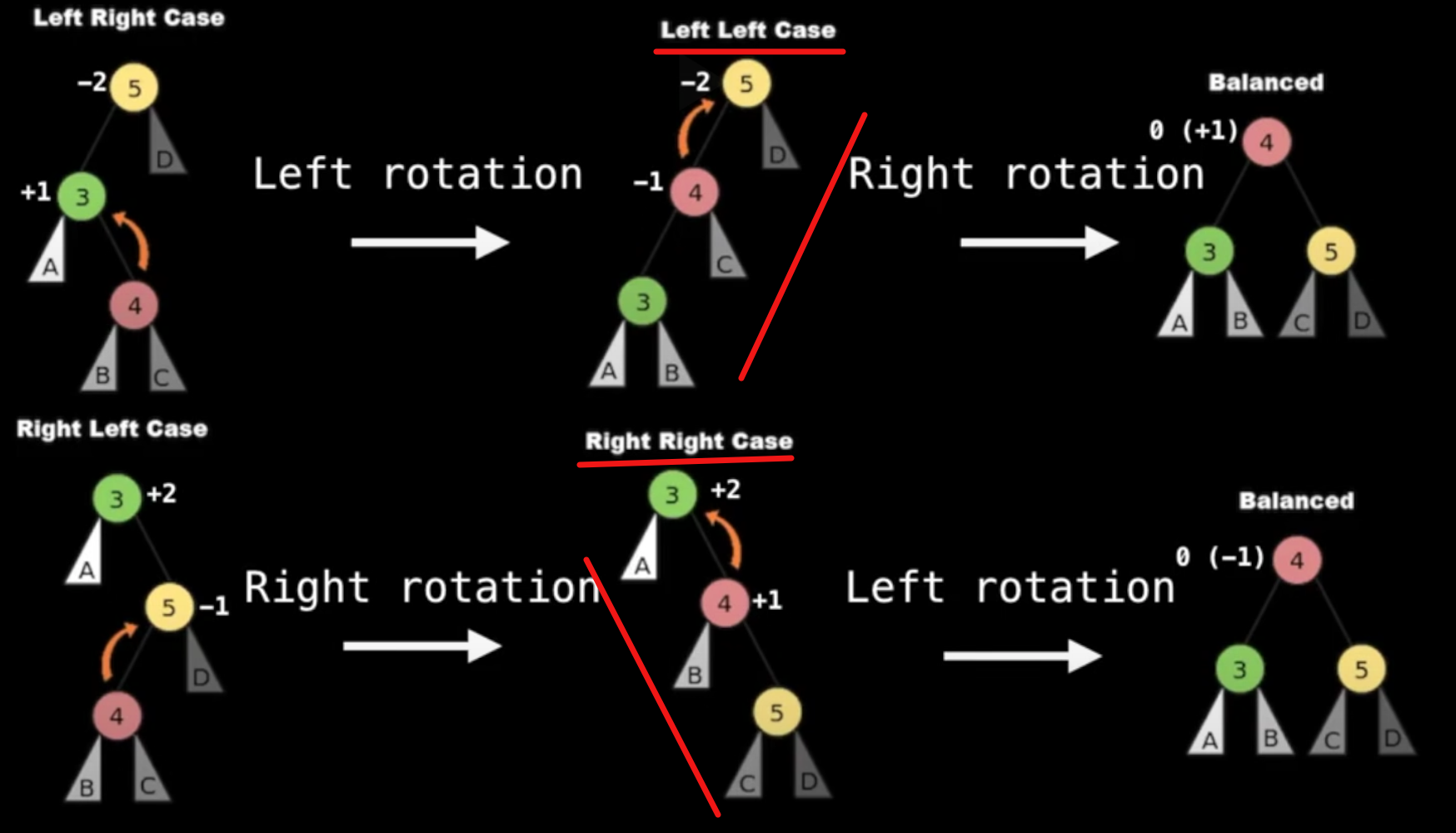
Insertion
一次插入需要考虑的是,插在哪边,以及插入后对bf, height和balance的破坏
其中修复平衡就是上图中几个基本结构的转换
Removial
avl树就是一棵BST,删除节点分两步:
- 按照bst的方法查找节点,即小的在左边找,大的在右边找
- 也按bst的原则删除元素,即找到元素后,把左边的最大值或右边的最小值拿过来补上删除的位置
- 这一步是多出来的,显然是要更新一下节点的bf和height,及重新balance一次了。
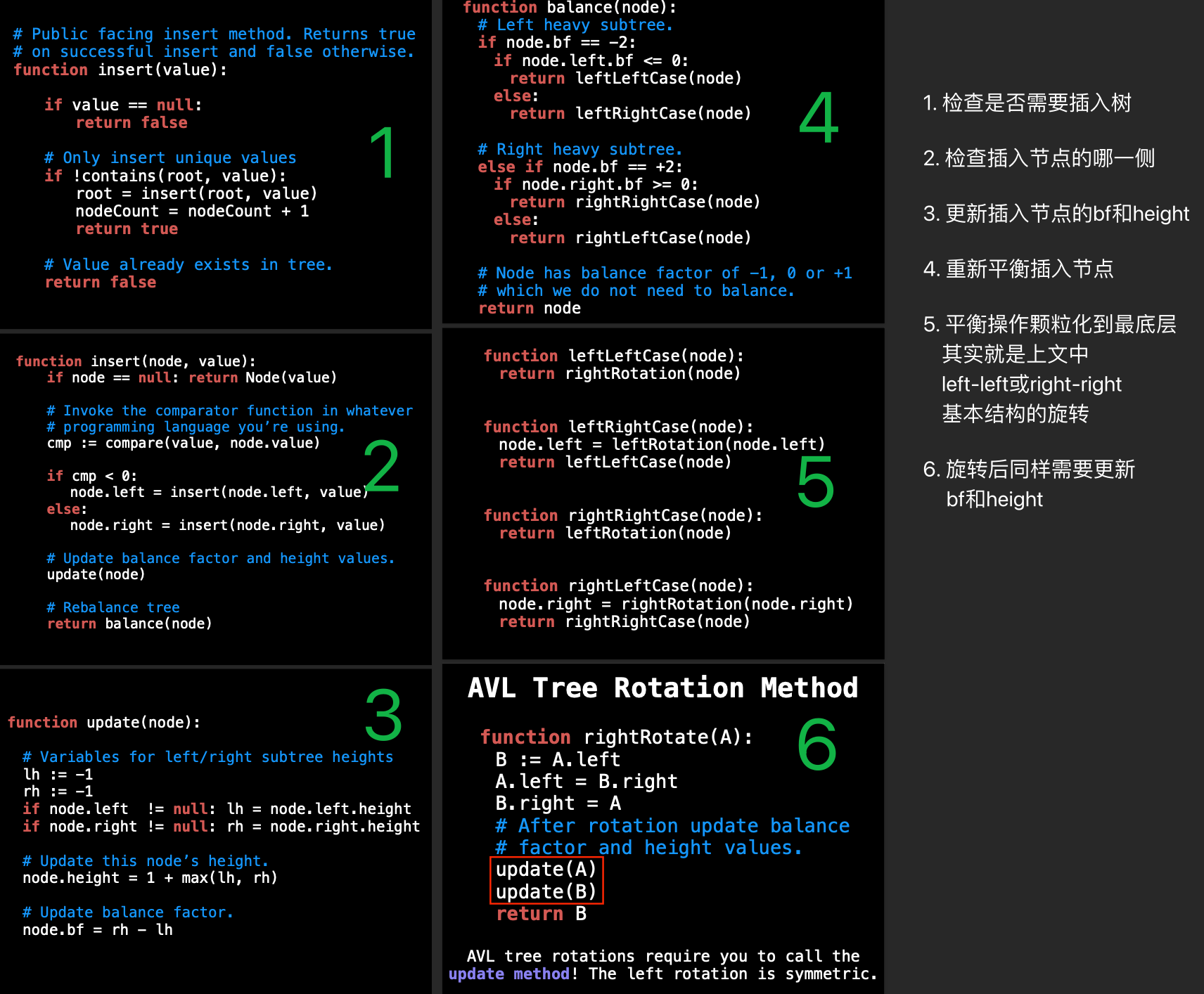
前两部分参考BST一章,流程伪代码:
function remove(node, value): ...
# Code for BST item removal here
...
# Update balance factor
update(node)
# Rebalance tree
return balance(node)
Indexed Priority Queue
- a traditional priority queue variant
- top node supports
quick update and deletions of key-value paris
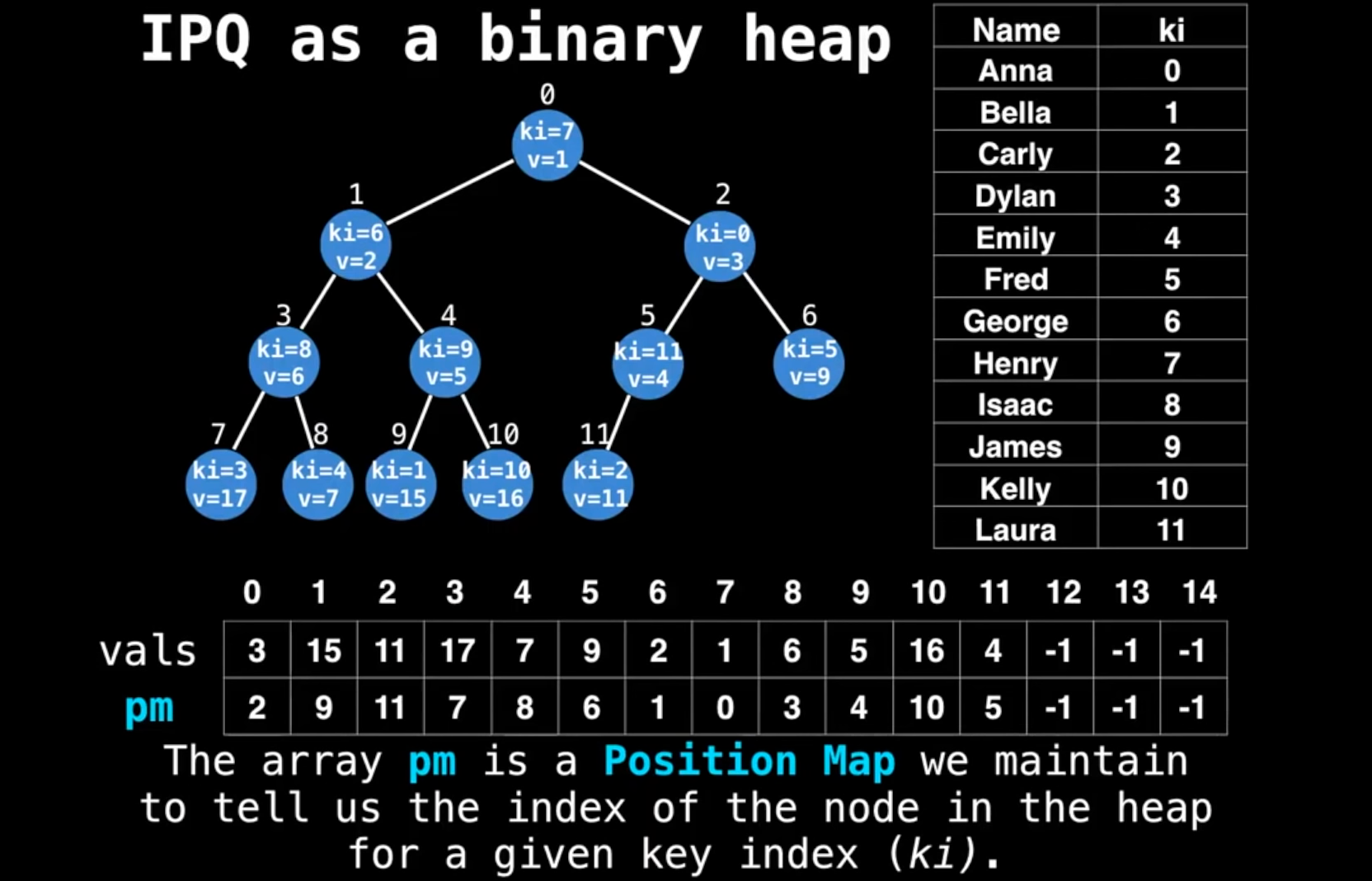 观察这个图,数据是Anna, Bella...等等,
观察这个图,数据是Anna, Bella...等等,
- 首先,为这一堆数据进行任意排序,得到一堆索引(0,1,...)
- 然后组一个binary heap,这样每个元素又获得一个索引,就是在heap上的序号(
Position Map)
通过两组索引迅速找到key(就是人名)在堆中的位置,比如:
- George,ki = 6, pm = 1
- kelly, ki = 10, pm = 10
- ...
现在能迅速找到数据源在堆上的位置了,那么如果反过来呢?比如堆上索引3是数据源的谁?
- pm = 3 -> ki = 8 -> Issac BINGO!!!
但神奇的事发生了,有人希望复用ki这个自然数序列(闲的蛋疼?),于是多做了一个数组,把ki定义为heap上的索引,与元素原来的ki进行映射(Inverse Map):IM
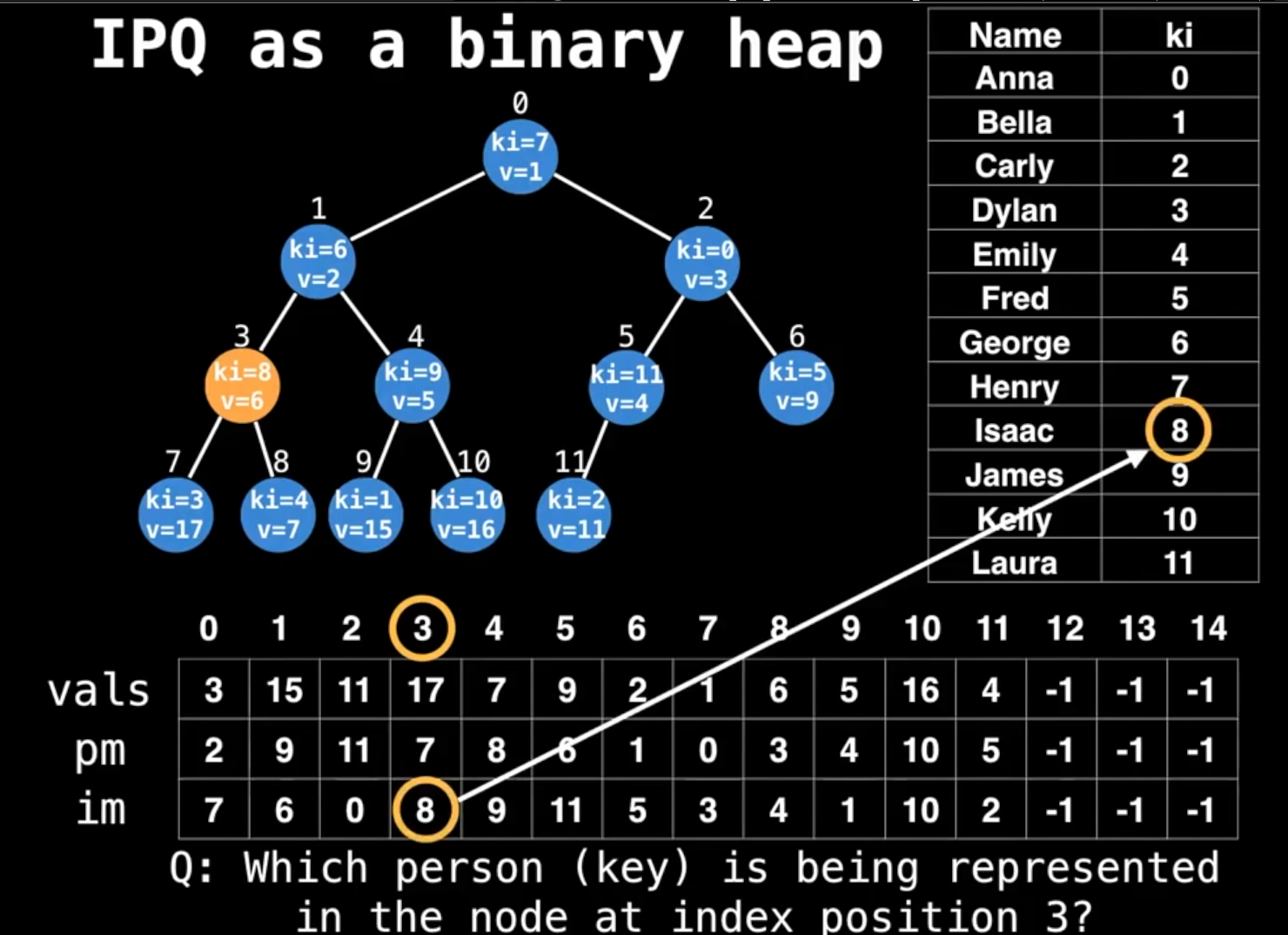 可以看到,这张图上张个ki到im的映射,与pm到ki的映射其实是一样的,也就是说重定义了一下,并没有引入新的东西。
可以看到,这张图上张个ki到im的映射,与pm到ki的映射其实是一样的,也就是说重定义了一下,并没有引入新的东西。
这个时候,我们直接用ki的3就能找到im的8,继而找到数据源的Issac了。
Insertion
上面的数组,我们往里面添加第12条数据试试:
- {ki:12, pm: 12, im:12, value:2}
- 显然违反了binary heap的 invariant,向上冒泡,也就是跟{ki:12, pm:5, im:2, value:4}的节点互换
- 此时,数据源肯定不会变,但是节点变了,pm的值就要交换(5, 12 互换)
- pm变了,把pm当成ki的映射表im也要变(12, 11互换)
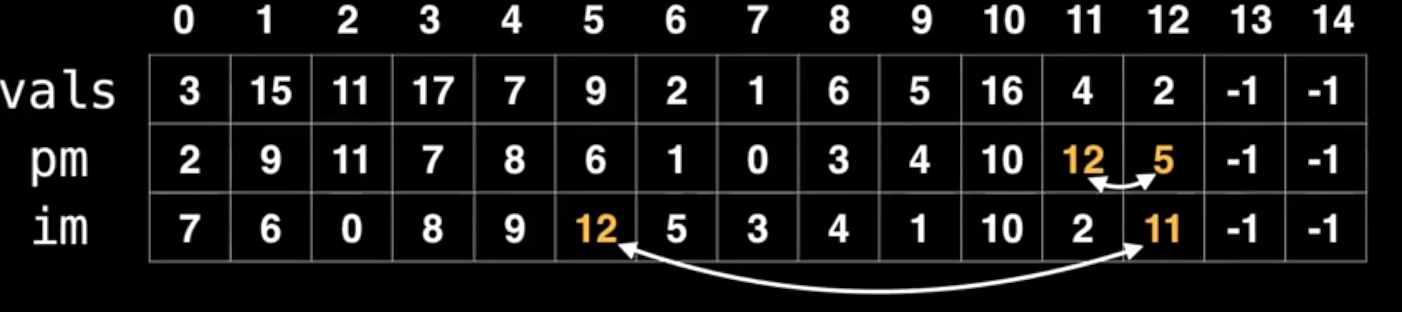 仔细观察图片,搞清楚第一行ki在两次互换时的身份就明白了
仔细观察图片,搞清楚第一行ki在两次互换时的身份就明白了 - pm的互换是直观的,就是节点的位置
- 知道pm互换的依据后(2,5),在第一行找2,5对应的im值互换,因为在这个映射里,相当于pm与原ki的映射,pm此时是(2,5)了。
同样逻辑继续冒泡就是了。
pseudo code:
# Inserts a value into the min indexed binary
# heap. The key index must not already be in
# the heap and the value must not be null.
function insert(ki, value):
values[ki] = value
# ‘sz’ is the current size of the heap
pm[ki] = sz # 对应上图,意思就第一行索引器是ki
im[sz] = ki # 对应上图,意思就是一行索引器是pm
swim(sz) # 这里传进去的pm,即heap上节点的索引
sz = sz + 1 # 添加成功,size加1
理论上,添加元素到最后一个, sz和ki应该是相等的(因为都是尾巴上)
# Swims up node i (zero based) until heap
# invariant is satisfied.
function swim(i):
# 比父节点小就冒泡,注意入参i是节点上的索引,即pm
for (p = (i-1)/2; i > 0 and less(i, p)):
swap(i, p) # 所以这里传的也是pm
i=p
p = (i-1)/2
function swap(i, j):
# 我们交换了节点,需要交换pm表里的值,和im表里的值
# 交换pm的值需要数据源的索引,即ki,而ki能从im表里用pm算出来
# 所以ki = im[pm] 这里i,j是pm,所以im[i]自然就是i对应ki
# pm[ki]当然就是pm[im[i]]了:
pm[im[j]], pm[im[i]] = j, i
im[i], im[j] = im[j], im[i]
function less(i, j):
return values[im[i]] < values[im[j]]
还是那句话,理解清楚那三行映射表里第一行的动态含义,就不会有问题。
- pm表要key index来索引
- im表要node index来索引 在操作时,只需要知道传入的是哪种索引,及时转化就行了。
有了索引,lookup的时间复杂度就是常量时间了:O(1)
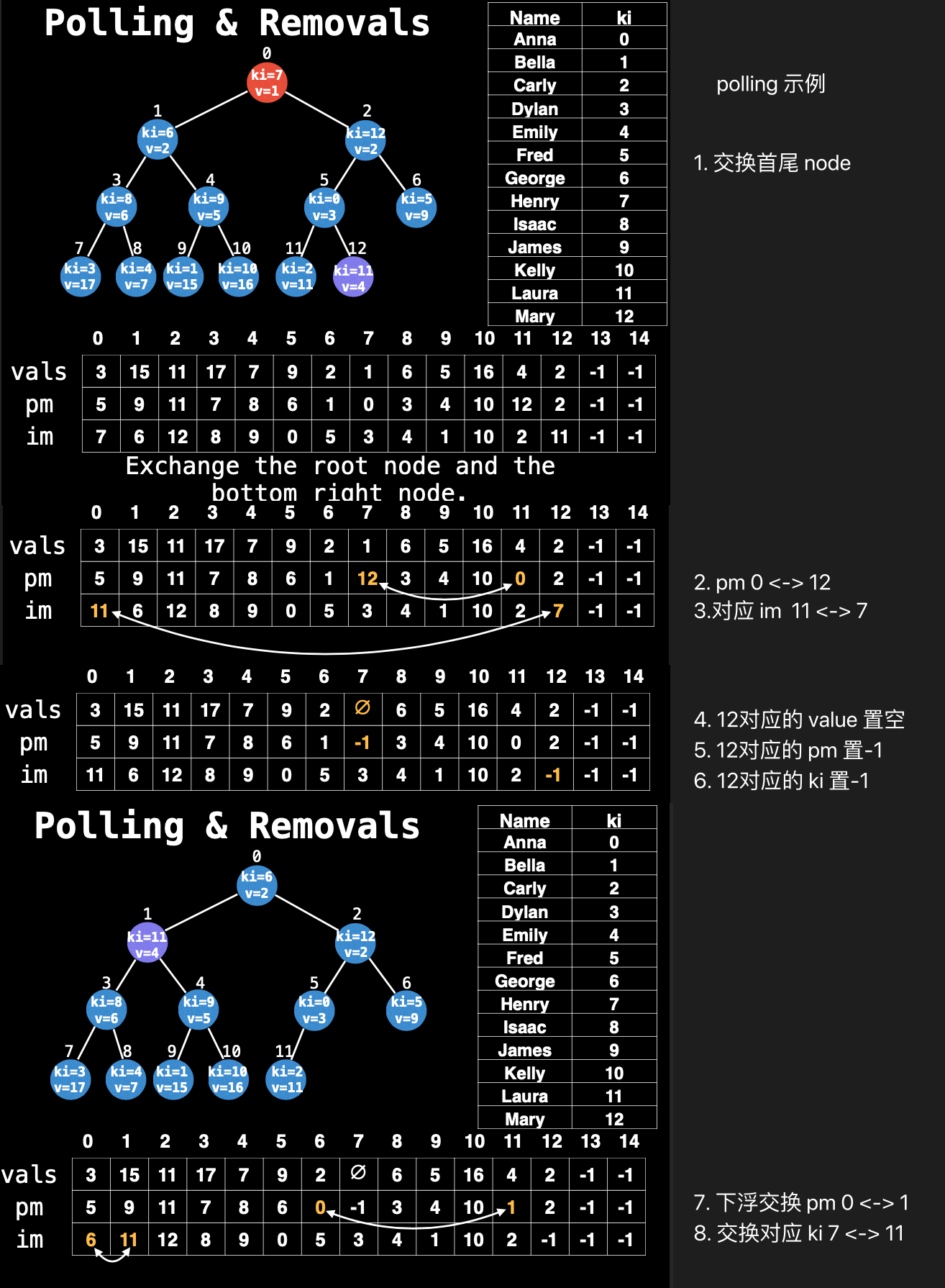
Polling and Removals
没有什么特殊的,仍然是找到节点,与最后一个交换,移除最后一个节点,然后再看最后一个在堆里是上升还是下降.
仍然是记得每一步交换,相应的几个索引值也需要随之交换.(polling 其实就是移除第1个节点,本质上还是 removal)
pseudo code
# Deletes the node with the key index ki
# in the heap. The key index ki must exist
# and be present in the heap.
function remove(ki):
# 注意,这里送进来的是ki,而不是node index(pm)
# 说明业务需求一般是操作数据源,而不是操作堆
i = pm[ki] # 转成节点索引
sz = sz - 1 # 与最后一个元素交换,用size来做节点索引
# 下面三个子函数送入的就是节点索引了
swap(i, sz)
sink(i)
swim(i)
values[ki] = null # 数据源对应的值置空,所以用ki
pm[ki] = -1 # 数据源对应的节点置空,所以用ki
im[sz] = -1 # 反查表用节点索引,此处size就是最后一个节点的索引
sink pseudo code
# Sinks the node at index i by swapping
# itself with the smallest of the left
# or the right child node.
function sink(i):
# 这是堆操作,传入的索引也是节点索引,没问题
# sink是下沉,但不是跟BTS一样找左侧最大右则最小那种直接换
# 而是一层层往下换
# 即一次while只跟左右子级比大小,确实比子级还小的话,就替换,然后再跟下一层比较
while true:
# 利用二叉树特性算出子节点
# 默认左边最小,然后再看右边是不是更小
left =2*i+1
right = 2*i + 2
smallest = left
# 右边不越界,且小于左边,就设右边
if right < sz and less(right, left):
smallest = right
# 左侧都越界了,或已经比最小值大了,说明不需要下沉了
if left >= sz or less(i, smallest):
break
# 只要没有break,说明能交换,然后把交换后的作为下一个循环的起点
swap(smallest, i)
i = smallest
Updates
更新节点要简单的多:
- 用ki找到value,把值更新
- 然后根据新value实际情况上浮或下沉
# Updates the value of a key in the binary
# heap. The key index must exist and the
# value must not be null.
function update(ki, value):
i = pm[ki]
values[ki] = value
sink(i)
swim(i)
Decrease and Increase key
不好说,先看代码吧:
# For both these functions assume ki and value
# are valid inputs and we are dealing with a
# min indexed binary heap.
function decreaseKey(ki, value):
if less(value, values[ki]):
values[ki] = value
swim(pm[ki])
function increaseKey(ki, value):
if less(values[ki], value):
values[ki] = value
sink(pm[ki])
代码里是跟一个固定值比较,只要ki对应的值比它大(desreaseKey)或小(increaseKey),就用这个固定值来替换它,并且在value改变后根据实际情况上浮或下沉。